Distributed by
Any reference to Raytheon or RTN in this manual should be interpreted as Raymarine. The names Raytheon and RTN are owned by the
Raytheon Company.
Distributed by
Any reference to Raytheon or RTN in this manual should be interpreted as Raymarine. The names Raytheon and RTN are owned by the
Raytheon Company.

Installation & Operating Handbook
Nautech Limiied, Anchorage Park, Portsmouth
Hampshire, PO3 STO, England.
Telephone (0705) 693611, Telex 86384 NAUTEC G.

CONTENTS
1 . General Description
1.1.1Course Computer
1.1.2Control Unit
1.1.3Fluxgate Compass
1.1.4 RuddepReference Transducer
1.1.5 Auxiliary Alarm
1.1.6 Radio Navigation Interface
1.2Hydraulic Drive Units
1.2.1Type 0 Hydraulic Drive
1.2.2Type 1 Hydraulic Drive
2 . Installation
2.1 .l Course Computer
2.1.2Control Units and Radio Navigation Interface
2.1.3Fluxgate Compass
2.1.4Rudder Reference Transducer
2.1.5Accessories
2.2Hydraulic Drive Unit
2.2.1Type 0 Installation
2.2.2Type 1 Installation
2 . 3 Cabling and Power Supplies
2.3.1Signal Cabling
2.3.2DC Power Supplies
3.2.1Fixed Control Unit
3.2.2Hand Held Control Unit
3.2.3Operating Mode Indication and Course Display
3.2.4
3.3Functional Test Procedures
3.3.1Setting Up
3.3.2Functional Test Procedure
3.3.3Drive Unit Test Procedures
4 . Sea Trials
4.1First Sea Trials
4 . 2 Rudder Control Adjustment
Page 2 3 3 3 4 4 4 5 5 5
6
7
7
9
1 0
1 1
12
13
13
14
14
15
17
17
18
18
19
20
21
21
21
21
22
23
23
2 4
25
25
10.Overseas Representatives 31

1. GENERAL DESCRIPTION
Congratulations on choosing the Autohelm PowerPilot. It offers outstanding self steering capability for a wide range of modern powercraft equipped with hydraulic steering.
The PowerPilot uses microprocessor based technology and easy to use control pads to give you total command under autopilot control without the need for constant adjustments.
The PotierPilot is manufactured by the world???s largest producer of Marine autopilots with Technical Advice, Service and Support ready to help you get the most from your Autohelm.
The PowerPilot is modular and designed for easy installation with flexibility to cope with the variation of individual craft and owner specifications. It is supplied as standard with the course computer, one control unit, fluxgate compass, hydraulic drive unit, and rudder reference
transducer. The basic Autohelm PowerPilot can be extended to suit
individual requirements. The basic system is illustrated below in Figure 1.
pump.
The course computer is splash proof only and must be mounted in a dry and protected position.
1 .1.2 Control Unit
FLUX GATE
Fig. 1 BASIC SYSTEM
1.1.3 Fluxgate Compass
The fluxgate compass has been especially developed for marine application. The compass contains a gimbal mechanism to permit accurate readings with pitch and roll movements up to t40??. The compass is bulkhead mounted below decks and connects directly to the course computer.
92mm (3.6in)
z
???
???
2
3

The rudder reference transducer provides the course computer with a precise rudder position. It is mounted on a suitable base adjacent to the rudder stock. The interconnecting cable connects directly to the course computer connector unit.
82Smm (3.2%)
1.1.5 Auxiliary Alarm (Cat. No. 2035)
The autopilot is provided with an automatic off course alarm system which sounds from all control units and provides sufficient audible warning under most conditions. In cases where a high power alarm is necessary, an auxiliary alarm can be fitted. The auxiliary alarm is connected to the main connector unit via a two
core cable.
1.1.6 Radio Navigation Interface
(Cat. No. 2057)
The PowerPilot can be interfaced to any Loran, Decca or Satellite Navigation receiver having a suitable cross track error output to NMEA0180/0182/0183. The radio navigation interface computes the course adjustments to enable the PowerPilot to steer to a selected waypoint.
The unit is waterproof and designed for surface mounting (normally adjacent to the Loran/Satellite Navigation receiver). If required the unit can be bracket mounted using the bracket mounting kit
(Cat. No. D104).
4
1.2 HYDRAULIC DRIVE UNITS
The PowerPilot is available with one of two hydraulic drive units, depending on the size of the vessel and the displacement of the ram.
The vessel size and displacement recommendations given below apply to directly driven steering systems. When a power steering system is fitted the vessel size and displacement recommendations can be ignored.
1.2.1 Type 0 Hydraulic Drive
The type 0 hydraulic drive unit consists of a twin cylinder piston pump powered by a small but powerful reversing electric motor.
The high volumetric efficiency of the piston pump provides precise control, with the twin pistons offering smoother and quieter operation than would be found with a single cylinder design.
1.2.2 Type 1 Hydraulic Drive
The hydraulic drive unit consists of a precision gear pump with integral valve block driven by a continuously rated servo motor. The pump drive motor is connected directly to the course computer which also regulates peak pump pressure and eliminates the need for end stroke limit switches.
w

2. INSTALMTION
WARNING
The Autohelm PowerPilot requires correct installation if it is to provide accurate safe self steering. Whilst designed for simple installation we strongly recommend that the system should be installed
professionally or alternatively professional advice be obtained if you intend to install the system yourself.
The manufacturers can accept no liability for any claims arising from incorrect installation or product useage.
2.1.1 Course Computer
Mounting Position - Below Deck
The course computer should be positioned in a dry protected area of the vessel free from high operating temperatures and excessive vibration. It can be mounted in any attitude. Care must be taken to allow at least 15mm (6in) clearance all round to aid heat dissipation from the power amplifier in the unit. Do not mount in the engine room.
DO NOT position the course computer so that it will:
???Receive any direct water splash/spray (from Bilge/Hatch etc).
???Be liable to physical damage from heavy
items.
0 Be covered by other equipment or onboard gear.
??? Be close to major sources of transmitted energy (Generators/S% radios, Aerial Cables etc).
M o u n t i n g I n s t r u c t i o n s
???Remove Terminal box lid (Fig. 2).
???Unscrew two internal thumb retaining nuts (Fig. 2).
???Unplug terminal box and mounting spine.
???Position terminal box and mounting
spine in correct location, mark off and pilot drill for the 5 self tapping screws supplied (Fig. 3).
???Screw terminal box and mounting spine into place.
???Plug course computer unit to terminal box. Retighten thumb retaining screws.
The course computer is now ready for wiring (see 2.3).
in use we strongly recommend the use of a protective cover (optional extra
Cat. No. DlOl).
WARNING
Safe operation of the PowerPilot requires that the control unit be mounted within easy reach of the helmsman when in the normal steering position. Position the control unit to ensure this requirement is m e t .
M o u n t i n g I n s t r u c t i o n s
The unit is attached with reusable positive locking pads. In most cases, the pads may be stuck directly onto the mounting surface.
??? Using the template supplied, select the control unit position, mark off and drill the 17mm (5/8in) hole for the interconnect cable.
??? Attach the
2.1.2 Control Units
Mounting Position - Control units must be mounted close to the steering stations. The unit is fully
??? Thoroughly clean the mounting surface with alcohol (or equivalent) and allow
to dry.
7

??? Thread the interconnect cable through the 17mm (518in) hole, peel off the backing from the pads (Fig. 5).
??? Press the unit onto the mounting surface maintaining pressure for 30 seconds to ensure a strong bond.
The control unit interconnect cable is now ready for connection to the course computer (See 2.3).
Where the control unit is to be mounted to a painted, varnished or untreated wood surface the carriers supplied should be used to provide a sound bonding surface for the mounting pads. (Fig. 6).
Fig. 6
Instructions
??? Using the template supplied mark off and drill the 17mm (518in) hole and mark off and pilot drill the fixing holes for the carriers.
??? Screw the holders inio position using the self tapping screwS provided.
??? Clean the holder surface with alcohol (oiequivalent) and stick the positive lock pads into place (Fig. 6).
???Note An additional foam seal must be used in this method to provide sealing.
???Carefully align the control unit with the
holders and press firmly into place to secure a positive attachment.
Removing a Control Unit
???Using a flat lever gently unlock the securing pads starting at one corner.
???Do not use excessive force.
0 The unit may be
pressing it???back onto the security pads.
2.1.3 Fluxgate Compass
The fluxgate compass may be attached to a convenient bulkhead using the self tapping screws provided. Unscrew the top cap to release the compass housing from the mounting bracket (Fig. 7). Screw the bracket to the bulkhead using the self tapping screws provided and finally re- attach???the compass body to the mounting bracket.
Correct positioning of the fluxgate is crucial if ultimate performance from the autopilot installation is to be achieved. The fluxgate should ideally be positioned as near as possible to the pitch and roll centre of the vessel in order to minimise gimbal disturbance (Fig. 8).
Fig. 7
It is very important to ensure that the fluxgate is positioned at least 0.8m (2ft6in) away from the vessel???s steering compass in order to avoid deviation of both compasses. The fluxgate must also be positioned as far away as possible from large iron masses, such as the engine and other magnetic devices which may cause deviation and reduce the sensitivity of the sensor. If any doubt exists over magnetic suitability of the chosen site, the position may be surveyed using a simple hand bearing compass. The hand bearing compass should be fixed in the chosen position and the vessel swung through 360??. Relative differences in reading between the hand bearing compass and the vessel???s main steering compass should ideally not exceed 5O on any heading.
Fig. 8
.
.
L+i
When the installation is complete the fluxgate compass should be approximately aligned with the vessel???s centre line by rotating the body until the arrows on the joint line face the bows (Fig. 9).

the rudder reference unit arm and tiller arm. If it is more convenient, the rudder Fig. 9reference unit may be mounted upside
down (label downwards), but if this is done, the red and green wires must be reversed in the connector unit.
It is important to ensure that
dimensions A and B (fig. 11) are the same at both points and that when the rudder is amidships the unit arm is opposite the cable gland and makes an angle of 90?? with the connecting bar.
2.1.5Accessories
The most comprehensive installation is ??? illustrated below in Fioure 12.
CONTROL fle =c5
RADIO NAVIGATION
INTERFACE
R U D D E R
Installation Precautions
Correct installation of the course computer and fluxgate compass is vital to the successful performance of the Autohelm Pow&Pilot. The installation precautions must be heeded if poor performance or even failure of the autopilot is to be avoided.
2.1.4 Rudder Reference
Transducer
The rudder reference unit must be mounted on a suitable base adjacent to the rudder stock (Fig. 10) using the self tapping screws provided. The base height must ensure correct vertical alignment of
Fig. 10
y-
I.
AA
I I/
Having selected a suitable position (Fig. lo), the interconnecting link A may be cut to length and the linkage fastened ensuring that the locking nuts B are secure. The tiller arm should be tapped M6 to a depth of 2Omm (13/l 6in) or through drilled to accept the ball joint supplied. The rudder should then be moved from side to side to ensure the linkage is free from any obstruction,
Radio Navigation Interface
(Cat. No. 2057)
This is installed using the same procedure as given for the control unit. (See 2.1.2).
R e m o t e C o n t r o l U n i t
The remote control socket is
four self tapping screws provided (Fig. 13).
HYDRAULIC
DRIVE UNIT
Auxiliary Alarm (Cat. No. 2035)
The auxiliary alarm unit is waterproof and may therefore be mounted in any position. The alarm unit is supplied with a terminal block to connect a two core interconnection cable to the course computer. A 22mm (718in) hole should.be bored through the mounting panel/deck to pass through the two way connector block and interconnecting cable (Fig. 14).
Finally, the alarm unit should be screwed into position using the four self tapping screws provided. A foam seal on the alarm mounting flange will ensure a watertight joint to the mounting surface.
Fig. 14
11
2.2 HYDRAULIC DRIVE UNIT
General guidelines
The hydraulic drive unit should be mounted clear of spray and the possibility of immersion in water. It should be
located as near as possible to the hydraulic steering cylinder. It is important to bolt the hydraulic drive unit securely to a substantial member to avoid any possibility of vibration that could damage the
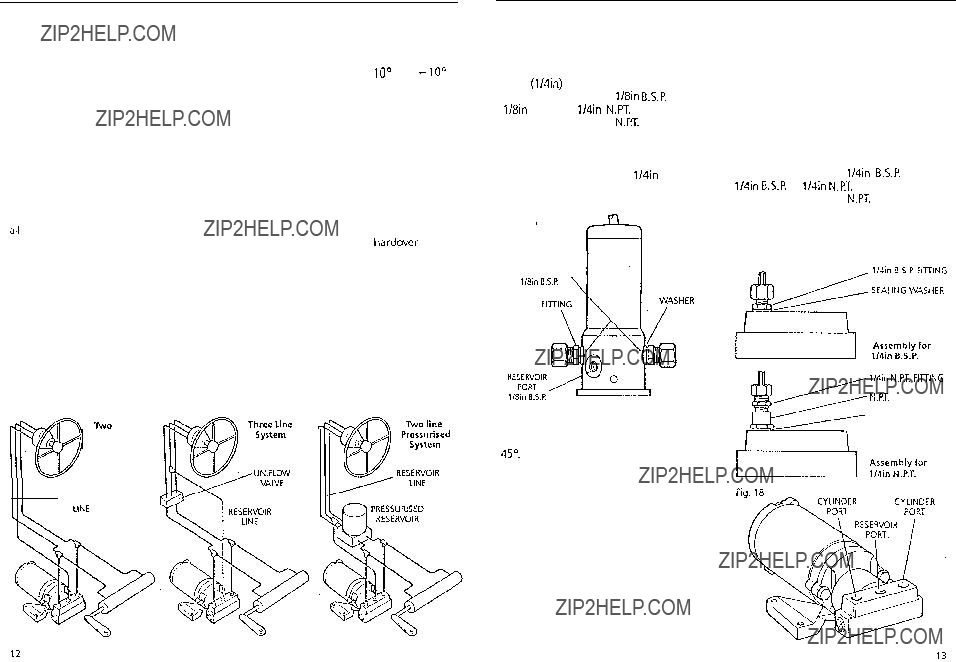
There are three basic types of hydraulic steering system, and these are illustrated in Fig. 15. Typical connection points for the drive unit are shown in each case. In all cases it is strongly recommended that the steering gear manufacturer be consulted.
Minimisation of hydraulic fluid loss during connection of the drive unit will help to reduce the time and effort required later to bleed the system of trapped air. Absolute cleanliness is essential since even the smallest particle of foreign matter could interfere with the correct function of precision check valves in the steering system.
Fig. 15
T.40 Line
:System
%
RESERVOIR
When the installation has been completed the hydraulic pump may be operated by switching the control unit to Auto and operating the + 10??? and - 10??? course change buttons. Greater motor movements will be obtained if the rudder control is set to maximum.
The hydraulic steering system should be bled according to the manufacturer???s instructions. From time to time during the bleeding process the drive unit should be run in both directions to clear trapped air from the pump and
If the air is left in the system the
steering will feel spongy particularly when the wheel is rotated to the hardover
position. Trapped air will severely impair correct operation of the autopilot and the steering system and must be removed.
During the installation of the system it has not been necessary to keep track of the connection sense to the hydraulic steering circuit since operating sense of the autopilot can be corrected if necessary by reversing the pobrity of the pump drive motor connections (see section 3.3.1).
r(
2.2.1 Type 0 Installation
The Type 0 pump must be mounted vertically with the mounting flange bolted to a suitable horizontal surface using four 6mm (114in) bolts.
All ports are tapped 1/8in B.S.P. Three 1/8in B.S.P. to 1/4in N.PT. adaptors are included to convert to N.PT. where required. The sealing washers supplied should be placed between the fitting and the pump (Fig. 16).
It is recommended that 1/4in fittings or larger are used throughout to minimise transmission losses.
Fig. 16 ???
STEERING
CYLINDER PORTS l/h B.S.P.
SEALING
The two cylinder ports are positioned opposite one another on the pump body. The reservoir port is marked R and is at 45???. All connections to the pump should be made with flexible hose.
Important Note
All connections in the reservoir line must be sound as any air introduced to this line will seriously degrade
p u m p p e r f o r m a n c e .
B l e e d i n g
The type 0 pump is sensitive to trapped air, and care must be taken during installation and commissioning to remove it. Before connecting the hoses to the
p u m p :
???Ensure all hoses are filled with oil
???Prime the pump ports with oil
When operating the hydraulic pump to bleed the system, turn the helm pump in opposition. This will help any air expelled from the hydraulic pump rise to the helm pump reservoir.
2.2.2 Type 1 Installation
The Type 1 pump should be mounted on a suitable horizontal surface.
All ports are tapped 1/4in B.S.P. Three 114in B.S.P. to 114in N.PT. adaptors are included to convert to N.PT. where required (Fig. 17). The sealing washers supplied should be placed between the fitting and the pump (Fig. 18).
Fig. 17
l/din N.P.T. FirriNG
N.PT. ADAPTOR
SEALING WASHER

.
I
2.3 CABLING AND POWER
SUPPLIES
2.3.1 Signal Cabling
Cable interconnections between all sub system modules are shown schematically (in Figs 1 and 12). All peripheral units
connect to the connector unit where they are permanently hard wired to colour coded connector blocks situated on a central printed circuit board (Fig. 19).
The end face of the connector unit is fitted with ten blanking discs (Fig. 20). which are easily pressed out and replaced by the special rubber grommets supplied
with each peripheral unit fixing kit _ , _
(Fig. 2 1). After cutting the interconnecting cable to length (Fig. 21), it may be passed through the inserted rubber grommet and prepared for connection to the relevant connector block (Fig. 19).
Each connector block is clearly identified on the printed circuit board and each wire position is identified by
coloured dots which match the individual wire colours. The cable screen should be connected to terminals identified by a white dot.
Each peripheral unit is supplied with 6m (20ft) of interconnecting cable. Additional cabling can be supplied in 12m (4Oft) cut lengths as follows:-
2.3.2 DC Power Supplies
(Fig. 22).
Flexible connection tails fitted with insulated spade connectors are SUpplicd with the course computer to connect ttle main power supply (Blue and Brown) and drive unit motor connections (Red a111j Black).
All four flexible wire tails are preconnected to a
Before commencing power cabling, all interconnecting terminal blocks should be screwed into a position where they will remain dry and protected. When pl,~nning
0 YELLOW
@ R E D
e BROWN
The total length of screened core cable connected to the serial bus (connectors Al
All cables should be run at least 1 m (3ft) from existing cables carrying radio frequency or pulsed signals, and should be clamped at 0.5m (1 .Sft) intervals.
the position of the course computer (ref.2.1.1). it is important to reduce the overall length of heavy power cable between the drive unit and the vessel???s central power distribution panel to a minimum.
Excessive lengths will generate losses in the cable and will reduce system performance. In addition, the cable length between the course computer and drive unit must be less than 5m (16ft).
Having sited the course computer, measure the total cable length between the drive unit and the vessel???s central distribution panel and select the appropriate cable size from the table below.
3. OPERATION
The power supply must be led from the main distribution panel and protected by means of a 25 amp fuse or current overload trip switch. A separate 5 amp fuse must be fitted in the electronic power supply cable.
Fig. 22
CIRCUIT BREAKER 25AMP- 12V
H E A V Y DUTY
P O W E R S U P P L Y
OUTPUT
TO MOTOR
ELECTRONIC
P O W E R
S U P P L Y
3.1 BASIC PRINCIPLES
The following description of the Autohelm PowerPilot???s principle of operation will help you to fully understand its controls.
Deviation from course is continuously monitored by a sensitive fluxgate compass and corrective rudder is applied by the drive unit to return the vessel to course. The applied rudder is proportional to course error at any time and thus when the course is restored the rudder will be neutralised. The amount of rudder
applied for a given
When changes in vessel trim occur due to variations in wind pressure or engine throttle setting the course can only be maintained by the application of permanent
Autohelm PowerPilot???s central computer also continuously monitors the pattern of applied rudder correction and can distinguish unnecessary repetitive corrections caused by pitch and roll of the
vessel from those necessary to maintain the selected heading. If unnecessary repetitive corrections continue the computer will automatically neglect them so that autopilot activity and power consumption is continuously optimised at minimum levels.
The high degree of control automation made possible by the system???s central micro computer simplifies user control to a series of push button operations.

3.2.3 Operating Mode indication and Course Display
Th e operatin g mod e o f th e autopilo t is indicated by a flashing red LED, as summarised below:-
not engaged
Autopilot engaged to steer compass heading
MANUAL
Hand held control power~~@j~fzJjj@ steering in operation
ii@ ON 0 OFF SECONDS ??? ! : : : : L;
2 0
3.2.4
When the autopilot is set to Auto mode a built in
The alarm will be silenced if the vessel returns to within 1 So of the original course. If the vessel does not return within course limits the alarm can only be
silenced by disengaging the autopilot and resetting a new course.
3.3 FUNCTIONAL TEST
PROCEDURES
The following functional tests and set up procedures must be carried out before sea trials are attempted.
3.3.1 Setting Up
Switch On
Switch on the electrical supply from the main panel. All control units will emit a short beep tone to indicate that the computer is now active. The autopilot will start up in Stand By mode.
Operating Sense
The operating sense of the autopilot can be checked as follows:-
* Select Auto
??? Select + 10 which should move the rudder a few degrees to produce a turn to starboard.
If this does not occur, correct operating sense can be restored as follows:-
* If the rudder immediately drives hard over to starboard, the red and green wires of the rudder reference transducer should be reversed in the connector unit.
??? If the rudder immediately drives hard over to port, the motor connections between the course computer and drive unit should be reversed.
??? If the rudder drives a few degrees to port, reverse the motor connections, and reverse the red and green wires of the rudder reference transducer.
N.B. Reversal of the motor connections should be permanently made at one of the main terminal blocks and not by reversing the spade connector flying leads to the course computer.
3.3.2 Functional Test Procedure
??? Switch on and note that all control units are live and signalling Stand by mode.
0 Key Auto on any fixed control unit and note that Auto mode is indicated on all control units.
??? Key course change commands from all control units noting that
corresponding helm movements occur. 0 Key Manual on the hand held control
unit (if fitted) and note that Manual mode is signalled from all control units.
??? Key power steer commands via the course control keys o f th e han d held control unit and note that corresponding incremental helm movements occur.
???Key Stand by
The automatic trimming capability of the autopilot can be observed by the following test:
Key Auto followed by a 1 O??? course change to starboard. This effectively simulates a condition where the need for standing helm has developed and the vessel is not returning to course. You will notice that an initial fixed helm movement is applied and that after a short interval the drive unit will continue to apply further incremental helm movements. If
21

4. SEA TRIALS
left in this condition the rudder will eventually be driven hard over. If, however, the vessel were moving through the water, the progressive application of additional helm would eventually return the vessel to the correct course with the necessary standing helm applied. Return to course can be simulated by keying - 10 (to return to the current heading). The progressive application of standing helm will cease when the fluxgate senses that the course error has been removed.
3.3.3 Drive Unit Test Procedures
Before attempting sea trials it is important to check that the vital link with the steering system provided by the hydraulic pump and rudder reference transducer are free from obstruction and operating correctly.
Warning
When the steering system is being moved manually or under drive from the autopilot do not touch any part of the system. The forces exerted are considerable and could cause injury.
With an assistant to turn the main steering wheel get into a position where the tiller and rudder reference transducer can be seen.
??? With the autopilot in Stand by turn the sheering wheel from hard over to hard over.
??? Check that the rudder reference transducer and linkage do not foul any part of the steering mechanism or vessel???s structure.
0 Select Auto and use the + 10 button to drive the rudder hard over (use??? maximum rudder setting).
??? Use the - 10 button to drive the rudder hard over in the opposite direction.
22
??? Check that the steering ram moves smoothly and that there is no excessive
play.
0 Check that all unions are tight and there is no seepage of hydraulic fluid.
Current Limit and Cutout
When the rudder is driven onto end stops drive to the hydraulic pump may cut out after a few seconds. This is normal. Drive will only be restored if the rudder moves away from the end stop or if drive is required in the opposite direction.
The performance of the Autohelm PowerPilot will only reach the designed levels if the installation of the hydraulic pump and rudder reference transducer is correctly engineered and adjusted. It is strongly advised that these be checked before sea trials.
Initial sea trials should be carried out in calm conditions with plenty of sea room. The previously conducted functional test will have verified that the autopilot is operating correctly and that you are familiar with all of its controls.
Set the rudder control on all control units to minimum.
Initial sea trials on fast planing vessels should be conducted at no more than half engine speed. Minimum setting of the rudder control should provide stable steering performance.
Fine setting of the rudder control is discussed later (4.2).
4.1 FIRST SEA TRIALS
During first sea trials, the vessel will be constanfly changing heading, and it is, therefore, very important to maintain a constant
@ Steer on to a compass heading and hold the course steady.
0 Press Auto to lock on to the current heading. In calm sea conditions a perfectly constant heading will be maintained.
0 Alter course to port or starboard in multiple increments of 1 and 10 degrees from any control unit. Course changes should be prompt and without any sign of overshooting.
??? If a hand held control unit is fitted key Manual to change over to remote power steering. Practice power steering using the four course control keys..
0 Press Stand by to disengage the autopilot for return to hand steering.
Automatic Sea State Control
During the sea trial, the operation of the automatic sea state control can be observed. When the autopilot is initially engaged in Auto mode the autopilot will respond to all pitch and roll movements.
During the first minute of operation, it will be noticed that repetitive movements of the vessel are gradually neglected until finally the autopilot will respond only to true variations in course.
To ensure precise course adjustments the sea state control is automatically reset whenever a 1 O0 course change is selected.
Automatic Trim Control
The Autohelm PowerPilot automatically corrects for trim. No adjustment of the pilot is necessary.
After each course change the Automatic Trim is cancelled and the Autohelm PowerPilot will
within say 10??? of the desired course and will only settle onto course when the Automatic Trim has been fully established.
It is recommended the following procedure is adopted for large course changes.
???Note required new heading
???Select Stand by and steer manually
???Bring vessel onto new heading
0 Select Auto and let vessel settle onto course
??? Bring to final course with 1 0 increments.
It is sound seamanship to make major course changes only whilst steering manually. In this way any obstructions or other vessels may be cleared properly and due account taken of the changed wind and sea conditions on.the new heading prior to engaging the pilot.
23
4.2 RUDDER CONTROL
ADJUSTMENT
The rudder control setting recommended on page 22 will provide stable control for initial sea trials. However, power craft can vary widely in their response to the helm and further adjustment of the rudder control setting may improve the Autohelm???s steering characteristics.
An excessively high rudder control setting results in oversteer which can be recognised by the vessel swinging from side to side of the automatic heading accompanied by excessive rudder movement. In addition, distinct overshoot will be observed when the course is changed. This condition can be corrected by reducing the rudder control setting (rotating rudder control anticlockwise).
Similarly, an insufficient rudder control setting results in understeer which gives sluggish steering performance and is particularly apparent when???changing course. This is corrected by increasing the rudder control setting (rotating rudder control clockwise). These tendencies are most easily recognised in calm sea conditions where wave action does not mask basic steering performance. The rudder control setting is not over critical and should be set to the lowest setting consistent with accurate course keeping. This will minimise actuator movements and hence reduce power consumption.
It may be noticed that the autopilot tends to be a little less stable on northerly headings in the higher latitudes of the northern hemisphere (and converse!y southerly headings in the southern hemisphere). This is caused by the increasing angle of dip of the earth???s magnetic field at higher latitudes which has the effect of amplifying rudder response on northerly. headings. The tendency towards northerly heading instability is usually more .obvious in
24
higher speed craft and when it occurs can be corrected by reducing the rudder control setting. In excess of 30 knots, a reduction by at least two positions can often be required within 45??? of North.
Planing Craft
On fast planing craft which operate over a wide speed range, the rudder control setting often requires reduction at higher speeds where steering effectiveness is increased. Oversteer can be extremely violent at planing speeds and it is recommended that the rudder control setting is reduced before opening the throttle.
5.1 UNSATISFACTORY STEERING
PERFORMANCE
If the Autohelm PowerPilot has been correctly specified, installed in accordance with the instructions and adjusted correctly it will provide outstandingly
good steering precision over a very wide range of wind and sea conditions.
If the performance falls below your expectations and the pilot appears to be working correctly the fault will normally be found by carrying out the simple checks outlined below. Before reporting your difficulties to an Autohelm specialist, please check the following:-
*Have the test procedures and adjustments detailed in Section 3.3
25

6. MAINTENANCE
7. FAULT LOCATION PROCEDURE
The autopilot is one of the most used and hardest working items of equipment on board, and therefore must receive its fair share of attention and routine maintenance.
Regular inspection of the installation is recommended in the following areas where applicable.
1.Check that Hydraulic Steering systems are free from leaks and trapped air. Bleed when necessary to remove air from the system.
2.Check that all
terminals are fully tightened and corrosion free.
3. Check that external waterproof sockets are capped when not in use and periodically spray with WD40 (or similar) to protect from corrosion.
Autohelm PowerPilot has been designed to achieve very high standards of reliability combined with ease of servicing.
If a fault should appear, please double check that all connections in the connector unit are sound and that the heavy power cable connections are tight and free from corrosion. If you are satisfied that all connections are sound, the simple check procedure tabulated below will assist you to locate the most likely fault area.
Since the course computer houses the majority of the electronic control system there is a high probability that if an electronic fault has occured it will be
located in this area. The course computer unplugs easily for servicing (Section 2.1.1).
Control units are removed using a suitable lever to separate the pads starting at one corner. Do not use excessive force. Disconnect from the connector unit and withdraw the interconnecting cable (Section 2.1.2).
The faulty unit should be removed and returned to your nearest service agent.
If any difficulties arise, please consult Nautech???s Product Support Department in the U.K. or your own National distributor who will also be able to provide expert assistance.
4.Check that the heavy power supply cable connections are tight and free from corrosion.
26
INSTALLATION
HAVE ONLY ONE
27
8. WARRANTY, AFTER SALES SERVICE
LIMITED WARRANTY
Nautech or its appointed Distributors or Service Centres will, subject to the conditions below, rectify any failures in this product due to faulty manufacture which becomes apparent within twelve months of its purchase date.
Equipment used in the country of purchase should be sent directly to the authorised Distributor for that country or its appointed Service Centres. The product will then be service free of charge and returned promptly direct to the sender.
Equipment used outside the country of purchase can be either:-
a.Returned to the Distributor or Dealer in whose country of from whom the equipment was originally purchased
and promptly returned direct to the sender, or
b.The product can be returned freight
basis that the Distributor or Service Centre will supply any parts used free of charge but the sender will be invoiced for the necessary labour and return shipment at the local rate.
CONDITIONS
The warranty is invalid if:-
a.The product has been misused, installed or operated not in accordance with the standards defined in this manual.
b.Repairs have been attempted by persons other than Nautech approved Service personnel.
FULL INTERNATIONAL
WARRANTY
Nautech or its appointed Distributors or Service Centres will, subject to the conditions below, rectify any failures in this product due to faulty manufacture which become apparent within twelve months of its purchase date wherever the vessel and the product may be operated.
CONDITIONS
1.The product must be installed aboard the vessel in the country of purchase.
2.The product must be installed in accordance with the recommendations issued by Nautech Ltd.
3.The installation must be carried out by an installer approved by Nautech: alternatively the installation must have been inspected and approved by Nautech or its approved installer.
4.The Warranty Registration Card must
be completed by:-
0 The Owner or User
??? The Dealer supplying the product 0 The Installer
5. The Full International Warranty is invalid if:-
(a) The product has been misused, or installed or operated not in accordance with standards defined in this handbook.
(b) Repairs have been attempted by persons other than Nautech *approved Service personnel.
(c) The warranty card has not been completed correctly or is not accompanied by proof of purchase.
CLAIM PROCEDURE
1.The product should be sent direct to Nautech or its appointed Distributor or
Service Centre nearest to the vessel. The completed Warranty Card and proof of purchase must accompany
the claim. The product will then be serviced free of charge and returned promptly direct to the sender.
2. Nautech,???its Distributors and Service Centres, are not liable for any charges arising from visits to the vessel not to attend to the product, whether under warranty or not, nor for sea trials or any other work associated with the installation. The right is reserved to charge for any such services at the local rate.
AFTER SALES SERVICE
Your Autohelm PowerPilot is designed to give you long service and reliable performance wherever you sail. To???ensure that you can always receive prompt and expert attention in case of any difficulty, Nautech has established a worldwide network of AUTOHELM SERVICE
CENTRES.
Please contact your nearest Service Centre for assistance. Always have ready:-
* Your Warranty Card
??? Proof of Purchase
28
29

9. SERUICECENTRES - UK,Eireand Channel Islands
10.OVERSEASREPRESENTATIVES
Ponsmo;th
Hdmphwe 0705 693611
PortsmouthlChichester
Harbour
Greenham Marine Ltd EmrwonhYacht Harbour Thaney Road
Emsworth
Hampshire
0 2 4 3 3 7 8 3 1 4
Chlchesrer Marina
Chichester
vuest Surseex
0243 511070
Hamble Rlverl
Southampton Water
a K Electra Marine
Ft,; ;;ard
WaMsh Hampshire o4a952170
Hudson Marine Electronics MercuryYa~ht Harbour Sdtchell Lane
Hamble
0 7 0 3 4 5 5 1 2 9
Lecmar Marine Electronics Arcalta Marine
COWS l o w
0 9 8 3 2 9 3 9 9 6
&Lymlngton/Poolr
Greenham Marine Ltd Klog Saltems Lane Lymmgton
Hampshire 0 5 9 0 7 5 7 7 1
Danlea Electronics Cobk Quay
PO& DOnet
0 2 0 2 6 7 3 8 8 0
Greenham MarineLtd Quay West Mama z&y Quay Road
DO&et
0 2 0 2 6 7 6 3 6 3
 aumin Marine Electronics
aumin Marine Electronics
OS4 8&i 3321
Greenham Marine Ltd
COXKk
Pfymwth
0752 228114
Marine Electronics Sflemr Putiige
auckfdnd arwer aideford
Norlh Own 0805 2 2 8 7 0
Ocean Marine Servicer 4 3 afetonride
Pfymwth
0 7 5 2 2 3 9 2 2
Quay Electrfcs (Teignmouth) Ltd The Sail Loh
Pump seeet arixham
080 45 3030
Mylor Marine Electronics
Falmouth
Cornwall 0326 74001
Sevrrn & Bristol Channel
AN D Electronics
Dene Road
Severnrlde Trading Estate
Avonmouth
arw0l
0272 821441
Dale Sailing Co Ltd
Ddk
Havedord West
DY+d
064 6.5 349
&No???h&WestWa~es
i\ Rowlands Marine Electronics Ltd
The Outer Harbour RNllheli
0 7 5 8 6 1 3 1 9 3
Sailtronic Marine Church Street
Glan Conv.vn chffl a& Clwyd
0492 $a 536
Merseyride
Robbins Marine Radio Servicer
Norfh East Cobwg Dock
Lwerpool
OS1 709 5431
190 Dock Street Fleefwocd
03917 5241
Northern Ireland
Belfast Lough Marine Electronics 55 aelfan Road
Cnickfergur
Co Antrim
0 9 6 0 3 6 5 5 6 5
Dublin 11
0 0 0 1 3 4 2 5 9 0
Rider Services Glenbrook Passage west Co Cork
0 1 0 3 5 3 2184 1 1 7 6
Steampacket Building East Quay
RansPf
Isle of Man
0 6 2 4 812583
S/W Scotland
Boat Elect& h Electronic
Ayrshire
0 2 9 2 3 1 5 3 5 5
western Scotland
Jeff Rutherford Yacht Electrical and Electronic Services targr Yacht Haven lrvme Road
Largr AyEhire
0 4 7 5 686091
Northern Scotland
a P ln~rument~t~onLtd Greenbank Road
East T???llOS
Aberdeen
0 2 2 4 8 7 4 0 0 3
scalloway Shetland
0 5 9 588 6 4 5
.fi S/E Scotland
Fonh Area Marine Electronics Electronics Centre
PoR Edgar
South Queensferry E d i n b u r g h
0 3 1 3 3 1 4 3 4 3
Humberside
i/&m Electronicc Marine Ltd &???WM Wrlghl0cck.s
Hull
0 4 8 2 2 5 1 6 3
,&& &;i;;???%$e Ltd
Grkgewalk Wroxham Norfolk
0 6 0 5 3 2 2 3 8
R 6 J Marine Electronics 2 alrch Avenue Dcwxoun ady
Harwlch
0 2 5 5 5 0 2 8 1 9
R 6 J Marine Electronics c/o Suffolk Yacht Hdrbour Levington
Iprwich
047 388 737
.A E s s e x
Mantrbrite htarine Electronics dff 19d Spatal Road
Maldon ESSex
0 6 2 1 53003
Heron Marine Services
129 aroddway dbKent
Herne say Kent
0 2 2 7 3 6 1 2 5 5
Channel lrlands
.iq aoatworkr + r????>Cartle Emplacement
*. $1 P e t e r POR
GWfWY
0481 26071
Jersey Marine Electronics umt 2
La we St n&r kSey
0 5 3 4 21603
Mainbrayce Ltd Inner t4arbour ar.+e
Alderney
0 4 8 1 8 2 2 7 7 2
Argentina
Trimer S.A.
Fray J.5 M. de Ore 2030/40 1425 Buenos Aires Argrntma
Tel: (010 54 I) 774 3728/4470
Telex: 007 33 23653 TRMER AR
Australia
Solo Marine Pty Ltd
11 Green Street
RwerbyNSW2212
AUSl&
T&(01061 2)7745255
Telex: M)7 71 127045 SOLMAR AA
FIX: (010 61 2) 7745291
Werner
A - 6890 Lusrenau
Relchrstrasx 38
Austria
Tel: (0104315577 2419
Fax: (010 43) 5577 24195
B a r b a d o s
C.O. Williams Electrical Co. Ltd Wa,,elW
St Mkherl
Barbddor Tel:(0101809)4252250
Telex: 007 392 2366 COW Wa
Fax: (010 1809) 424 0374
Belgium
West Diep Yachting Centre SPRL a.a450 N~euwwon
Louisweg 2 Belgium
Tel: (0103258) 234061 fa.~:(01032 sajsa23924a
Bermuda
Marine Communications 72 Pntr Bay Road
Pembroke HM 06 Bermuda
T~I: 010 i 809) 295.0558
Telex: 007 290 3795 MARCO aA
Fax: (010 1 809) 292 co79
B r a z i l
Fast Yachts
Control S A. lndurtro E. Comerico P.0 Box 12700
sao Paub - SP ardril
Tel:~01055)115211944
Telex: CO7 38 11 24612 CNTO RR
Fax: (010 55) 11 5 4 8 2 0 7 0
British Virgin Islands
Cay Electronics
P.O. aor 3 4 5 Road Town TOr7&
arbtlrh Wrgin Islands
Tel: (010 1 a09 49) 4 2 4 0 0
7&x: 007 2 5 5 510 1006891 ESLUD 63~. (010 i a09 49) 4 4 7 0 7
Tom Taylor Co. Ltd
72 Fraser Avenue
Toronto M6K 3El
Ontario
Canada
Tel. LO10 !416)53Olatl
Telex. 007 2 1 06524332 TOMTAYCO TOR
Fax: (010 I 416) 5304345
Canary Islands
Norden
us iuan awista 57 Santa Cruz de Tener,fe Canary lrldnds
Tel. (010 34 22)
CYPNS
Mercury Diven Co. Limited 53 Spyrou Araouzou Street P.O aor 469
Limarrd Cyprus
Te~fO1035751)65492
Telex: W7 605 4976 MERCDNE 0???
Finland
Oy Maritim Aa
Veneentek~~antie 1
;el:(010358)0673331
Telex. 037 57 124788 MARJT SF Far:(010358)06927917
France
5.0.Marine Electronique
17.25Rue Barian
7 8 5 0 0 5anr0~~~11e
France
Tef.(O1033)139146833
Telex: 007 42 658347 SDMELEC
Fax: (010 33) I 3913 3022
Gibraltar
Bond Innrument~tion
The D&yard
Gibraltar
Te~(OIO35Ol73701
I&<: 007 405 2373 GlaREP GK
Fax: (010 350) 73726
Sale3
H. Sheppard 6 Co.
W.C3pXt
G,braltdr
Tel (010 350) 77183
Telex. 007 405 2324 MARINA GK
G,ee<e
Piraeur Electronic 46 ALU h4oursopoulou hlarlnd Zear
la5 36 plraeus GWXe
T&(010301)4531027/41a 1 7 9 7 T e l e x : 0 0 7 6 0 1 241219DORlGR Fax (olo301)4la 1091

H o l l a n d
Bconwna???s Handelmaatxhappij 8.V P O BorNr.50128
1305 AC Almere Have??? H&r!d
Tel- (01031 3240) 11524 Telex: 007 44 70121 GEBONI Far (010 313240) 11519
H o n g K o n g
Far East Yacht Specialists limited M 2 floor
Earkervik House 22 Ice HOuIe street
Hong Kong
Tel: (010852)5 257015/5229394
Tele:: 007 802 65925 KREMA HX
I c e l a n d
&nco Ltd Lagmula7
1 2 5 Reykjavik kcland
Tel: (0103541)8jO7?
Teler 007 SO1 2334
Brim Yacht I Marine Supply
Tel Am P.O. Box 33232
Israel
Tel: (010 972) 320 259913284432 lelcr 2 6 5 8 7 1
(Gu&eret J37AlJR)MONREF G
Italy
Deck Marine Vdc Cerdosa 155 2 0 1 5 1 M4am IldfY
~4: (010 392) joa 7229
Telex: 007 43 353147 DECK I
Fax: (010 392) 301 3398
Japan
J.M.J. Limited 2F lnago Bldg 370 Hayama - bhli Mum
Kanagawa Japan
Tel: (01081)46876 1511
Telex: 007 72 3852532 JMJJPN J Fas 010 81468 76 1044
RipardLawan 6 Ripard
156 Ta???Xbier Seafront
Yachttviatia
Maka
Tel: 1010 356) 3559)
Telex: CQ7 406 934 YOTS MW
Netherlands Antllles
Radi&+olland Caribbean NV P.O. Box 146
Phrlipburg
5, thanen Netheriandr Antilles Tel. (010 599) 522583 la: (010 599)
Marine torail Pacifique BP 648 Noumea NewCole&&
Tel: IO10 687) 27 58 46
T&r 007 706 3 120 CONIPANS NM Fdx: 1010 687) 27 66 43
NewZealand
Lusty 6 Blundell limited 69 Wairau Road
Takamna
Auciland 10
New Zealand
T&(010649)4443675
Telex: W7 74 60324
fax: (010 64 9) 444 3738
N o r w a y
Seatronic AIS
nardd HaarldgrE54Jl s 15w Moss
Ncmay
Tel: (010 47)9 2727331231272835
Telex: 007 56 76542 SIRON N Far:(01047)9274152
P o r t u g a l
A. Percira Jordao RuadcloreFakao 1 5 2 . 1 5 6 4ooo PortoCc&?*
Ponugal
Tek(o10351 2)209479
Telex: CO7 404 22308 JORDAO P Far(010351 2)314169
Slngaporc
Co???%micatio???s Syrtemr Engineering Pte Lld
67 Ayer Rajah Crescent 07.01 Smgapm 05 I3
Tel. @lOSSI 77 65191
Telex: W7 07 23036 DEBEGPL Fax:(01065)7766795
Souih Afrlcr
Central Boating Pty Limited a I Brec 5seet
Cape Tow??? 8Wl South Africa
Tel: Ml0 27 21) 248026r7@
Teh: 0 0 7 9 5 5 26712% Fax~OlO2721)242564
SpaIn
Sit&
MuntanerM
Eartelona 11
Spain
Tel:1010343)3234315
Tekx: 007 52 542 18 SITf E
Fw(OlO343)3235062
A x h t d e 6 Hansson
Nya Vdw?l
5.421 71v: Frotunda
SWfden
Tel:~OlO4631)291111
Telex: 007 54 21447 AXHAS
Fax:(0104631)292789
.
Switzerland
Yachting Systems
General Wdle Slrarre IO
8002 Zurich Enge
Swuerland
Tel: (01041 I)202 8044
Telex: 007 45 816598 YASH CH
Far:(01041 I)2028064
T a i w a n
Ing Hai Company Limited
P O Box 9 - Y
Tel: (010 88 6215312 068
Telex: 007 785 13951 VIRAGO
Fax: (010 88 62) 5376 531
Turkey
Turimpex
M. Burhanetlin Tekdag
Haydn Irk&i Cad.
8 0 6 8 0 Etiktar
Istanbul
Tel: (010) 16046881161 01 3 2
Telex: CO7 607 26613 TRIM TR
U S A
SWVilX
Autohelm America
New Wh,tBeld Streel
;y;fmd, CT 06437
%i: CO10 I 203) 453 8753
Telex: W7 230 643 804 IMI
Fax:(OlOl 203)4536109
west Gcrmdnv
Ferropilot GM& 2 0 6 4 R&we???
Tel.(010494101)301240 Telex:00741 2189160FERD Fax:(010494101)301214
West lndln
The Signal Locker
Nelsoon~s Dockyard
Antigua
Tel:(O101809)4631528
Telex:(CO7393)214212ll9
DYRDBHT AKNACHTS AK
Fax:(0101809)4631524
Yugorldvld
Mare Nostrum
Yachting Ccarulting
Eorur CcirbSdin
M.Tira 85
Opdlljd
Yugcriavia
Tel:~0103851)713506
Telex: 007 62 24215 TEHRI YU
32
4434312