Bluetooth QuickStart Kit Version 1.0 - User???s Guide
Copyright
Bluetooth QuickStart Kit
User???s Guide
A Quick Way to Start Using and Integrate
Bluetooth in YOUR Application???
Builds on InfraBed??? technology
Bluetooth QuickStart Kit Version 1.0 - User???s Guide
Copyright
Bluetooth QuickStart Kit
User???s Guide
A Quick Way to Start Using and Integrate
Bluetooth in YOUR Application???
Builds on InfraBed??? technology
Embedded Artists AB
Friisgatan 33
Sweden
info@EmbeddedArtists.com
http://www.EmbeddedArtists.com
Copyright
No part of this publication may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any language or computer language, in any form or by any means, electronic, mechanical, magnetic, optical, chemical, manual or otherwise, without the prior written permission of Embedded Artists AB.
Disclaimer
Embedded Artists AB makes no representation or warranties with respect to the contents hereof and specifically disclaim any implied warranties or merchantability or fitness for any particular purpose. Information in this publication is subject to change without notice and does not represent a commitment on the part of Embedded Artists AB.
Feedback
We appreciate any feedback you may have for improvements on this document. Please send your comments to support@EmbeddedArtists.com.
Trademarks
InfraBed and ESIC are trademarks of Embedded Artists AB. All other brand and product names mentioned herein are trademarks, services marks, registered trademarks, or registered service marks of their respective owners and should be treated as such.
Copyright
Copyright
1 Introduction
Thank you for buying Embedded Artists??? Bluetooth QuickStart Kit based on the LPC2106 ARM7??? microcontroller from Philips and
The Bluetooth QuickStart Kit contains a
Extensive documentation is included in order to lower the threshold of start using the kit even further. You can start to develop and include your own application on day 1.
The LPC2106 microcontroller from Philips is used on the board. It is part of Philips new
This document is a User???s Guide that describes the Bluetooth Quickstart Kit with accompanying software and program development tools. Amongst other, the document contains information about the included software and a description on how to develop and add your own application. Also, electrical and mechanical information about the board is included.
1.1 Contents
The box received when ordering the Bluetooth QuickStart Kit contains the following:
???One Bluetooth QuickStart Board including one
???One 64 Mbyte (or larger) SD memory card.
???One
???One DC power supply, 5 volt 300 mA. Observe that the Bluetooth QuickStart Board does not contain any reverse polarity protection. If voltage is applied with wrong polarity, the board will likely be damaged. Also observe that 6.0 volt is the absolute maximum voltage that can be applied without damaging the
Always use the included DC power supply to avoid possible damages.
???One serial extension cable,
In addition, you may want the following in order to start developing applications with the
Bluetooth QuickStart Board:
???An optional JTAG interface, for program development debugging.
Observe that a JTAG interface is not needed for downloading new programs into the Bluetooth QuickStart Board. This can be done through the serial channel, but a JTAG interface enables better control over the processor and better debug support.
1.2 Using Bluetooth QuickStart Kit in Products
The Bluetooth Quickstart Board is not primarily designed for use in volume productions. It has been designed as a reference platform that illustrates how Bluetooth can be used and as an experimentation platform. The board can be used for
Copyright
Modifications to the design for OEM production can easily be done. Contact Embedded
Artists for further information about design and production services.
1.2.1Design and Production Services
Embedded Artists provide design services for custom designs, either completely new or modification to existing boards. Specific peripherals and/or I/O can easily be added to the different designs, for example communication interfaces, specific analogue or digital I/O, and power supplies. Embedded Artists has extensive experience in designing industrial electronics in general, and specifically with Philips LPC2xxx microcontroller family.
???Prototype and
???
1.3Software License
The software platform is provided as a library. This library may only be used in conjunction with the Bluetooth QuickStart Board, i.e., it may only run on a Bluetooth QuickStart Board. Embedded Artists sells commercial licenses for the software platform (including source code) that can run on any custom hardware. Please contact Embedded Artists for pricing information about commercial licenses of the software platform.
1.4 Product Registration
The accompanying
By registering as a customer of Embedded Artists and as a Bluetooth QuickStart Kit user you will always have access to the latest information and new material (e.g., new sample applications).
Registering is easy and done quickly.
1)Go to http://www.EmbeddedArtists.com, select Support and then Register.
2)Type in the products serial number (can be found on the Bluetooth QuickStart Board or on the package carrying the board) along with your personal information.
1.5Other QuickStart Boards and Kits
Visit Embedded Artists??? home page, www.EmbeddedArtists.com, for information about other QuickStart boards / kits or contact your local distributor.
Copyright
2 Bluetooth QuickStart Kit
This chapter provides a description of the Bluetooth QuickStart Kit; the platform (software and hardware aspects), features, and typical usage.
2.1 Software Platform
The Bluetooth QuickStart Kit includes a
???Researching (RTOS, Compiler/IDE, TCP/IP Stack, PPP Stack, Web Server, File System)
???Hardware design (this is of course not part of the software platform, but an activity that is typically also required if you don???t buy an
???Configuration (RTOS, Compiler/IDE, TCP/IP Stack, PPP Stack, Web Server, File System, Board Support Package)
???Testing (hardware, each individual software component, integrating the platform)
Figure 1 below illustrates both the software and hardware side of the Bluetooth QuickStart Kit platform. Many sample applications are included in the kit just to lower the threshold of start using the kit and to quickly get you
Bluetooth QuickStart Platform
YOUR Application
+
Lots of Sample Applications
Figure 1 ??? Bluetooth QuickStart Platform
2.2 Features
The software features of Embedded Artists??? Bluetooth QuickStart Kit are:
???Contains a
???RTOS, TCP/IP Stack, PPP Stack, Web Server, FAT File System, Registry
???Code delivered as a binary library
???Source code package also available as separate purchase.
Copyright
???Software platform code base is easily ported and extended to other hardware, including other processor families.
???Many sample applications included in order to lower the threshold to get you started.
???Complete development environment is included (compiler, linker, make, editor, etc.)
???Based on GCC.
???Other compilers also supported, like Keil and IAR.
???The user can easily add own applications and experiment with the technology.
???About 30 kbytes of FLASH available and about 10 kbyte of SRAM
The hardware features of Embedded Artists??? Bluetooth QuickStart Kit are:
???Built around the new LPC2106 from Philips (ARM7TDMI).
???128 Kbyte program Flash and 64 Kbyte SRAM
???Processor pins available on an expansion connector for user hardware expansion.
???
???Also works with
???Works with connectBlue???s Serial Port Adapter Wizard program
???Connector for MMC/SD memory card
???ESD/EMI protected RS232 channel available for connection with other systems or debug printouts.
???Support for automatic program download over the serial channel.
???32 kByte
???Standard 20 pos. ARM JTAG connector available for debug.
???Size: 108 x 58 mm
???Four mounting holes are 100 x 50 mm apart
???Power: 5VDC, <150mA
2.3Typical Usage
The Bluetooth QuickStart Kit can be used to easily create advanced MMI
???Use the web server to expose information and parameters that can be controlled.
???Use the file system to store HTML files and picture files.
???Use the serial channel to communicate (expose information or control parameters) with ANY System.
???Access the system directly via a PDA, a laptop, or a Bluetooth LAN access point.
Figure 2 below illustrates how the Bluetooth QuickStart Board can be connected to any embedded system and expose internal variables in this system, or alternatively controls
Copyright

internal parameters in the system. Communication with the (arbitrary) embedded system can be done via the RS232 serial channel.
ANY System
Expose
 Application
Application
Control
Stationary
Ethernet
Laptop
WWW
Figure 2 ??? Typical Bluetooth QuickStart Application Scenario
In the scenario above, the Bluetooth QuickStart Board is used to create an advanced user interface to the embedded system. It is also possible to embed a complete application into the Bluetooth QuickStart Board. Relatively large applications can be added to the
ANY System
Application
Laptop
Stationary
Ethernet
WWW
Figure 3 ??? Integrating a Complete Application into the Bluetooth QuickStart Board
There is a trend towards more integrated system solutions, especially in industrial applications. Driving factors are more cost effective solutions (in many cases also increased performance) and better possibilities for surveillance, diagnostics, and maintenance. There
Copyright
are many interesting business possibilities when integrating diagnostic functions in a system, like better maintenance and a profitable after market. Remote administration and remote control gives the prerequisites of lower working expenses, lower total system costs, and a profitable after market.
The Bluetooth QuickStart Kit allows you to experiment and develop these kinds of applications.
Copyright
3 Bluetooth
This chapter provides a description of typical
3.1 Typical Industrial Bluetooth
There are basically two different
???User Interface
In this case, Bluetooth is used to access a system wirelessly in order to control different parameters and/or to retrieve information. A web server is used to create the user interface and a standard web browser can be used to access the system.
???
In this case, Bluetooth is used for communication between different (industrial) systems. Standard TCP/IP communication is used to transfer information. Alternatively, Bluetooth is used to create a simple serial cable replacement. The Bluetooth modules from connectBlue have this feature
A user interface can be viewed as the manual version of the automatic M2M communication. An operator can basically perform all the operations manually that would otherwise take place automatically.
The following sections will describe a couple of typical advanced industrial Bluetooth use- cases, all of which can be built by using the Bluetooth QuickStart Kit. Motor applications are used to illustrate the industrial function, but can of course be any industrial building component.
3.2 Remote Access
Remote access of a system has many benefits:
???A more
???General cost reduction since information can be accessed without physical presence near the system.
Examples of remote access systems are different meter systems, like power meters and water meters. The information is produced locally (at a remote location) and is more valuable in a central place. Figure 4 below illustrates the remote access
Bluetooth or direct access
Operator Stations
Figure 4 ??? Remote Access
Copyright
3.3 Remote Control
Remote control is almost the same as remote access. The only difference is the direction of the information. In remote access the information mainly flows from the remote system to (typically) a central place. In remote control the information direction is the opposite; from the central place to the remote system. A number of (typical) example applications are:
???Motor control, which can for example be a softstarter, power control (on/off), adding remote I/O capabilities, and simple PLC functionality.
???Pumps, which is basically a motor system that must be controlled.
???Conveyors, which is also a motor system with many parameters to set.
???Ventilation systems, which can be advanced control systems with many parameters to set and control.
???Device configuration, which is the general case of controlling a remote system.
Figure 5 below illustrates remote control of a motor, either via direct cabling or direct
Bluetooth access via a PDA or laptop.
Operator Stations
Start Motor
Internet
 Bluetooth or
Bluetooth or  direct access
direct access
Wireless
PDA
Figure 5 ??? Remote Control
There are many benefits when creating remote control systems:
???Of course, the ability to control remote control systems at remote locations
???Wireless control, sometimes as simple as serial cable replacement, but also more advanced forms of communication.
???The possibility to control hazardous applications, which can for example be dangerous to be physically close to the system (i.e., rotating or
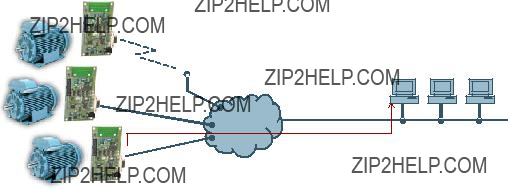
3.4Remote Diagnostics
Remote diagnostics is an important application of remote access. An example application is motor diagnostics that will serve as a reference application in this description. Examples of analyses are:
???Bearing vibration analysis
???Voltage and current measurement
???Temperature measurement
???Counting number of start and stops
The information can either be locally analyzed or sent to a central location for further processing. Decisions, like immediately stopping the motor, can be taken locally if the
Copyright

decisions must be made quickly. Trends can be discovered when analyzing the data, for example that a bearing is about to break down but will hold for another two months. Maintenance can in such cases be planned in advance to minimize the operation costs. Figure 6 below illustrates a typical system with motor diagnostics.
Operator Stations
Vibration too high.
Stopping motor!
 Bluetooth or direct access
Bluetooth or direct access
Wireless
PDA
Figure 6 ??? Remote Diagnostics
The benefits of remote diagnostics are numerous:
???Lower maintenance cost
???Fewer unexpected system failures since maintenance can be planned in advance
???The prerequisite for Service Level Agreements (SLAs)
???The possibility for remote data logging
3.5Local Service
Local service is a good example of how the web server functionality in the Bluetooth QuickStart Board can be used. The system stores a number of relevant documents, such as:
???Service Logs
???Blueprints
???Datasheets
???User???s Manuals
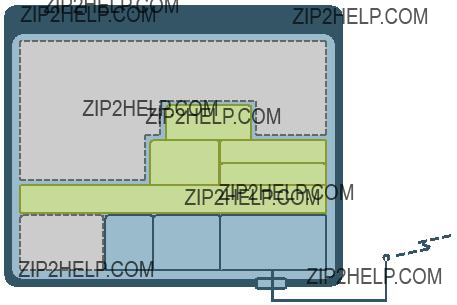
The system can of course also be configured via the web server user interface. Figure 7 below illustrates the local service
Service Log
Blueprint
Service Log
User???s Manual
Figure 7 ??? Local Service
Copyright

A field engineer, or similar, can then easily access all relevant documents directly on site. The system becomes more
The benefits are also in this case numerous:
???Easy local access to the system
???No need to physically connect to the system
???Manuals and logs are always available on the system
3.6Bluetooth Profiles
What is a Bluetooth profile?
Well, it is basically the result of genuine engineering work. The profile concept is used to minimize (perhaps not completely eliminate) the risk of interoperability problems between different manufacturers' Bluetooth products. A number of user models describe different user scenarios and roles, where Bluetooth performs the radio transmission. Different profiles have been developed based in these use cases. A profile describes how to implement a specific group of use cases. It also defines options in each protocol (in the Bluetooth protocol stack) that are mandatory for the profile, as well as parameter ranges for each included protocol.
The profile protocols can be viewed as protocols placed on top of the basic Bluetooth protocol stack. A profile can be described as a vertical slice through the protocol stack. Many profiles build on each other. For example, the LAN Access profile requires the Serial Port profile, as do the
Every Bluetooth unit must support the Generic Access Profile, or GAP for short. It defines many of the basic Bluetooth functions, such as device discovery, security, and name discovery.
3.6.1Serial Port Profile
There are a lot of profiles that have absolutely no use in industrial applications but rather targeted for specific consumer applications, such as transferring pictures from a digital camera, transferring data to a printer, and sending/receiving faxes. These profiles will not be covered, but two profiles are worth mentioning. The first of them is the Serial Port Profile, or SPP for short. It emulates a serial cable connection between two peer devices, or simply put, transparently transfers a stream of byte from point A to point B and vice versa.
SPP has defined the roles DevA and DevB. DevA is the initiator of a connection, and DevB is hence the recipient of a connection request. In order for a device to enable incoming connections, the DevB role must be enabled in that specific device. It is possible to have several parallel connections in a device, i.e. several instances of DevA and/or DevB. Figure 8 below illustrates the different SPP roles.
Figure 8 ??? Serial Port Profile Roles
3.6.2LAN Access Profile
The second profile what we will have a closer look into is the LAN Access Profile, or LAP for short. It allows a device to access a LAN (typically an Internet network) through a gateway (actually a server). LAP has defined the roles LAN Access Point (LAP) and Data Terminal (DT). The LAP acts like a gateway and provides the actual LAN access, and the DT device uses the services provided by LAP. Figure 9 illustrates the roles. To enable
Copyright

incoming connection requests to the LAN Access Profile, the LAP role must be enabled in that specific device. It is possible to enable several instances of the LAP role in order to allow several parallel connections through the LAP. A device must take the DT role in order to connect to other devices supporting the LAP role.
The data transfer takes place over PPP and TCP/IP, which encapsulate the actual user data. The LAN Access profile only provides a transparent serial channel, much like SPP. Only PPP is dictated by the profile, but TCP/IP is almost always used on top of PPP.
Also observe that the LAN must not be an actual LAN (like Ethernet). It can also be a simulated LAN, which is very application specific.
Figure 9 ??? LAN Access Profile Roles
3.7 connectBlue???s Modules
The Bluetooth module
???SPP server
The module waits for SPP clients to connect and establish transparent serial channels. This mode is not used in the Bluetooth QuickStart Kit.
???SPP clients
The module tries to connect to SPP servers, in order to establish a transparent serial channel. This mode is not used in the Bluetooth QuickStart Kit.
???LAN Access Server
This is the normal operating mode when using the Bluetooth QuickStart Kit. The board behaves as a web server that can be accessed from LAN clients that connect to the LAN server. The system waits for clients (i.e., web browsers) to connect. There is no actual LAN that is accessed. Instead the TCP/IP stack and web server on the board are accessed.
???LAN Access Client
This is an alternative operating mode when using the Bluetooth QuickStart Kit. In this case, the system initiate connection requests (i.e., it is a client) to other LAN access servers. These servers can be only web servers without any actual LAN behind when, or they can be LAN access points. In the latter case, the servers act as gateways between the Bluetooth world and (typically) a wired Ethernet world.
Copyright

4 Compiling and Running Application
Programs
This chapter provides a description of how to develop, compile, and download applications into the Bluetooth QuickStart Board.
4.1 File Structure
The
???
???TCP/IP protocol stack
???PPP protocol stack
???Web server
???File system, supporting MMC/SD memory cards. Supports FAT16.
???Registry, for
The platform is place in a directory called QSPlatform. This directory contains two important files; quickstart_vXYZ.a (which is the library of the platform) and quickstart_vXYZ.h (which is the API definition). _vXYZ indicate the version of the platform, and can for example be _v102 (meaning version 1.0.2). See Figure 10 below for an illustration of the file structure.
 QuickStartKit
QuickStartKit

 QSPlatform
QSPlatform 
Glue between platform and application

 Inner Subdirectories
Inner Subdirectories
*.c
Sample_xxx *.h
*.c
Sample_yyy *.h
*.c
Sample_zzz *.h
*.c
Your_application  *.h
*.h
Sample Applications
Source code that demonstrates different functionality within the platform
Sample Applications
Source code that demonstrates different functionality within the platform
Sample Applications
Source code that demonstrates different functionality within the platform
Your Sample Application
Source code that implement your application
Figure 10 ??? Bluetooth QuickStart Kit File Structure
A number of sample applications are included in the Bluetooth QuickStart Kit. These are placed in the different sample_xxx subdirectories. It is recommended to study these examples for a better understanding of the platform and how to create custom applications. Each sample application typically contains one, or more,
Copyright
application and a makefile. The makefile contains directives of how to compile and link the complete application. A typical makefile is listed in Figure 11 below.
/*
* Example makefile that creates a program called ???mySampleApp??? */
# name of the program NAME = mySampleApp
PROJECT_ROOT = .
Name of final program.
#Link program to RAM or ROM (possible values for RAMROM is RAM or ROM,
#if not specified = ROM)
RAMROM = ROM
#
#(possible values for DEBUG are 0 or 1) DEBUG = 1
#Optimization setting
#
#Extra flags
EFLAGS =
#Processes run in ARM or THUMB mode
#OBS. Do not change this setting. Instead,
TASK = THUMB
# subdirectories to recursively invoke make in
SUBDIRS =
# additional libraries to merge into this library
include program.mk
Include the platform library: quickstart.a
Always include glue.c
Also include all application files, in this case: mySampleApp.c
Figure 11 ??? Example Makefile
A typical application (mySampleApp.c, in this case) includes the file glue.c (under the file root) and includes quickstart_vXYZ.h whenever the platform API must be used. The file glue.c contains a number of initialization functions and program hooks (can be used for extending the functionality of the platform). Also, the library quickstart_vXYZ.a is included in the final link stage.
4.2 Program Development
Three different application program development environments are supported:
???InfraBed from Embedded Artists
Embedded Artists unique configurable software generator contains a complete GCC build environment for very easy program development. The current version of GCC is 3.4.3. By installing InfraBed you will automatically also get a complete setup of the build environment. This is the preferred way of developing and compiling application programs.
???IAR Embedded Workbench
A complete development environment from IAR Systems, including an editor, project manager, a complete compiler build environment, and a debugger. This development environment must be bought separately from IAR.
Copyright
???Keil uVision (DKARM version)
This is another complete development environment, but from Keil. It includes an editor, project manager, a complete compiler build environment, and a debugger. An evaluation version can be downloaded from Keils homepage. The
4.2.1InfraBed
Along with InfraBed, a complete build environment and program download exist for GCC. The build environment is built around a bash script. This script sets up all necessary paths. When installing InfraBed you will automatically get shortcuts to this bash script. A practical feature is that there can be different scripts for different hardware platforms, for controlling different hardware specific details of the platforms. There can also be many different compilers (including different versions of the same compiler) without conflicting with each other.
To build the application program, start a command prompt (the bash script) and type: make. Depending on the make file content, either an executable program or a library will be created. To also download the executable program, type: deploy instead of make. A description about program downloading can be found in Section 4.3 .
A final note about the make file; make clean will erase all object file.
4.2.2IAR Embedded Workbench
Consult the IAR Embedded Workbench documentation (after installation) for details about how to get started.
4.2.3Keil uVision
Consult the Keil uVision documentation (after installation) for details about how to get started.
4.3 Program Download
When the application program has been written, compiled, and linked with the platform it is time to download the program into the Bluetooth QuickStart Board. It is assumed that there exists a
There are basically two ways of downloading a program into the LPC2106 microcontroller:
???ISP ???
The LPC2106 microcontroller provides
oPhilips provides a utility program for
oAlternatively, there is a program called LPC21ISP that can be used. Source code is available. This program also provides a terminal functionality, which can be very helpful when developing your application program. The same serial channel that is used to download the program is typically also used for printing out information from the running program. The program immediately switch to terminal mode after program download and will hence not miss any characters sent on the serial channel directly after program start.
Copyright

The installation files for both programs can be found on the accompanying CD-
ROM.
???JTAG
For specific information about program download (i.e., Flash programming) with a JTAG interface, consult the manual for the specific JTAG interface that is used (e.g.,
Set switch SW2 in the position that enables the automatic program download feature. After program download, switch SW2 can be left in the ???enable automatic bootloader??? position or changed into the ???disable automatic bootloader??? position, if needed. If, for example, the system that is connected to the RS232 channel controls the RS232 signals DTR and/or RTS during normal program execution, then it might be required that SW2 is placed in the ???disable automatic bootloader??? position. Else the automatic bootloader may be unintentionally activated.
4.3.1Philips LPC2000 Flash Utility
Philips LPC2000 Flash Utility program looks like Figure 12 below.
Figure 12 ??? Philips LPC2000 Flash Utility Screenshot
Configure the dialog as shown above. The program will control the RS232 signals DTR and RTS if the appropriate checkbox is checked, and hence provide fully automated program download.
Test connection with the Bluetooth QuickStart Board by pressing the Read Device ID button. The text fields for Part ID and Boot Loader ID will then contain uploaded information from the microcontroller. Observe that the XTAL Freq. must be set to appropriate value. The default mounted crystal frequency on the Bluetooth QuickStart Board is 14.7456 MHz. In this case the value 14746 shall be written in the text box. If no connection can be established test with a low Baud Rate, for example 1200 bps. Also verify that the correct
Select the HEX file to be downloaded and then press the Upload to Flash button.
The downloaded program will immediately start after the download (i.e. the Upload to Flash operation is ready) is the option Execute Code after Upload is checked.
4.3.2LPC21ISP
The LPC21ISP program is made publicly available by Martin Maurer. Source code is also available at: http://engelschall.com/~martin/lpc21xx/isp/index.html. Figure 13 below shows the command syntax for the program.
Copyright

Figure 13 ??? LPC21ISP Portable Command Line ISP Screenshot
A typical program download sequence may look like in Figure 14 below. As seen, the first part is the actual program download phase. Then this is done, the program switches to being a terminal (the second part) and the messages from the application program are displayed. It also sends anything typed on the keyboard back to the Bluetooth QuickStart Board. As seen the program ends when ESC is pressed.
Program
Download
Phase
Terminal
Phase
Figure 14 ??? LPC21ISP Portable Command Line ISP Download Screenshot
Observe that the binary version 1.22 of the program will not work directly without a change in the reset timeout (when the program tries to synchronize to the Bluetooth QuickStart Board). The timeout must be increased to at least 200 ms.
LPC21ISP is automatically invoked when deploy is typed in the command prompt (the bash script from InfraBed).
Copyright
5 Schematic and Measurements
The chapter describes the Bluetooth QuickStart Kit board schematic and measurements.
5.1 Schematic
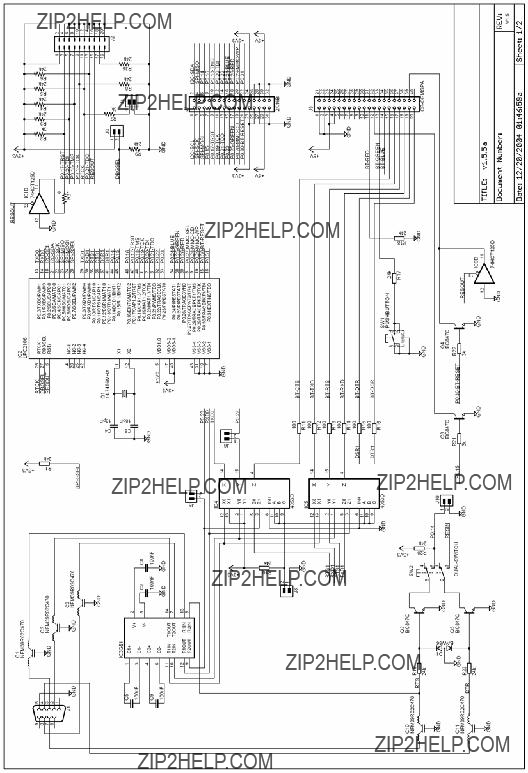
The Bluetooth QuickStart Kit board schematic is drawn in Figure 15 and Figure 16 below.
Figure 15 ??? Bluetooth QuickStart Board Schematic Drawing Page 1
Copyright
Figure 16 ??? Bluetooth QuickStart Board Schematic Drawing Page 2
Copyright

5.2 Board Interfaces
The Bluetooth QuickStart Kit board has a number of external interfaces as illustrated in
Figure 17 below.
Bluetooth
module
Reset
LED
Reset button
Figure 17 ??? Bluetooth QuickStart Board Interface Description
Table 1 below explains each board interface in more detail.
Female
A standard RS232 channel with ESD/EMI protection. Normally connected to a PC or an embedded system.
Connector is used for:
1.Program download
2.Terminal printouts for application program development debugging
3.Connection with ANY embedded system, in order to transfer data between the system and the
Bluetooth QuickStart Board.
Pin 2 = transmit data (output) Pin 3 = receive data (input)
Pin 4 = DTR (input) for controlling automatic program download
Pin 5 = ground
Pin 7 = RTS (input) for controlling automatic program download
Pin 8 = CTS (output)
Copyright

Power jack
The power input is protected against reverse polarity, but the board may still be damaged if reverse polarity is applied. Also, never exceed +6V DC because the
Always use the power supply that comes with the Bluetooth QuickStart Kit.
Reset LED
Reset is typically active 120 mS.
Reset button
Manual reset button that will generate a 120 mS reset pulse.
Expansion connector
All processor pins are available at the expansion connector. Many pins are used by the Bluetooth QuickStart Kit platform, but some are still available. Consult the LPC2106 datasheet for detailed signal description.
The LED lights when reset is active, i.e., the reset signal is low.
See schematic (Figure 15 and Figure 16) for signal positions.
JTAG connector
JTAG connector for program download and program debugging. Consult the LPC2106 datasheet and ARM JTAG description for details about all signals and functionality.
Standard 20 pos. ARM JTAG connector.
How the connector is connected to the LPC2106 processor pins is shown in the schematic, see
Figure 15.
Bluetooth module
This is the Bluetooth module from connectBlue. Consult the modules datasheet for detailed functional and signal description.
Bluetooth factory reset switch
This
See
Copyright
This
RGB LED #1
This RGB LED is controlled from the Bluetooth module and indicates current status.
RGB LED #2
Flashing Blue = Data is transferred over the active connection
This RGB LED is controlled by the application program and can be used for program debugging or showing application status.
Table 1 ??? Board Interfaces
5.3 Bluetooth Modules
The Bluetooth connector (J9 in the schematic) supports four different versions in the OEM Serial Port Adapter family from connectBlue, as listed in Table 2 below.
Table 2 ??? OEM Serial Port Adapters
Copyright

5.4 Board Jumpers
There are six jumpers and one switch on the board. These are illustrated in Figure 18 and explained in Table 3 below.
Automatic bootloader enabled
Automatic bootloader not enabled
J3
J4
J5
J6
J8
J10
Figure 18 ??? Jumper Description
The table below explains the different jumpers.
J5 ??? RTS
The application program has the option of controlling the RTS/CTS signals on the RS232 serial channel, if needed.
If used, signal P0.23 is the RTS signal and P0.23 must be an input.
Jumper shorted = Pin P0.23 act as
Jumper open = Pin P0.23 is free to be used for other tasks (default position)
Copyright

J6 ??? CTS
The application program has the option of controlling the RTS/CTS signals on the RS232 serial channel, if needed.
If used, signal P0.22 is the CTS signal and P0.22 must be an output.
J8 ??? Serial Channel Select
The serial channel of the Bluetooth module can be connected either to the LPC2106 microcontroller or the RS232 serial channel.
Jumper shorted = Pin P0.22 act as
Jumper open = Pin P0.22 is free to be used for other tasks (default position)
Jumper shorted = LPC2106 communicate with Bluetooth module (default position)
Jumper open = Bluetooth module is connected directly to the RS232 serial channel. Use this position when connectBlue???s Serial Port Adapter Wizard is used.
Table 3 ??? Board Jumpers and Switch
Copyright

5.5 Board Measurements
The board is 108 x 58 mm and Figure 19 below illustrates the mounting hole positions. The four mounting holes are 3.5 mm wide and 50 x 100 mm apart.
50 mm
100 mm
Figure 19 ??? Mounting Hole Positions
Copyright
6 Further Information
The Bluetooth module from connectBlue and the LPC2106 microcontroller from Philips are complex products and there exist a number of document with a lot of information. The following documents are recommended as a complement to this document.
[1]connectBlue Serial Port Adapter, 2nd Generation, User Manual http://www.connectblue.com/files/spa2_documentation/ cb_serial_port_adapter_gen2_user_manual_2_11.pdf
[2]connectBlue Serial Port Adapter, 2nd Generation, AT Commands http://www.connectblue.com/files/spa2_documentation/ cb_serial_port_adapter_gen2_at_commands_specification_5.pdf
[3]connectBlue OEM Serial Port Adapter, 2nd Generation, Electrical & Mechanical Datasheet
http://www.connectblue.com/files/spa2_documentation/ cb_oem_serial_port_adapter_gen2_e_m_datasheet_1_5.pdf
[4]connectBlue Serial Port Adapter, 2nd Generation, Use Cases and Features 1.0 http://www.connectblue.com/files/spa2_documentation/ cb_serial_port_adapter_gen2_application_scenarios_1_0.pdf
[5]Philips LPC2106 Datasheet http://www.semiconductors.philips.com/acrobat/datasheets/
[6]Philips LPC2106 User???s Manual http://www.semiconductors.philips.com/acrobat/usermanuals/ UM_LPC2106_2105_2104_1.pdf
[7]Philips LPC2106 Errata Sheet http://www.semiconductors.philips.com/acrobat/erratasheets/2106.pdf
[8]ARM7TDMI Technical Reference Manual. Document identity: DDI0029G http://www.arm.com/pdfs/DDI0029G_7TDMI_R3_trm.pdf
[9]ARM Architecture Reference Manual. Document identity: DDI0100E
Book, Second Edition, edited by David Seal,
[10]ARM System Developer???s Guide ??? Designing and Optimizing System Software, by A.N. Sloss, D Symes, C. Wright. Elsevier: ISBN
[11]Embedded System Design on a Shoestring, by Lewin Edwards. Newnes: ISBN 0750676094.
[12]GNU Manuals http://www.gnu.org/manual/
[13]GNU ARM tool chain for CygWin http://www.gnuarm.com
[14]An Introduction to the GNU Compiler and Linker, by Bill Gatliff http://www.billgatliff.com
[15]LPC2000 Yahoo Group. A discussion forum dedicated entirely to the Philips LPC2xxx series of microcontrollers. http://groups.yahoo.com/group/lpc2000/
[16]Embedded Artists??? Reference Documentation:
Copyright
[17]Embedded Artists??? Reference Documentation: TCP/IP Protocol Stack http://www.embeddedartists.com/download/pdf/refDoc_tcpip.pdf
[18]Embedded Artists??? Reference Documentation: Embedded Web Server http://www.embeddedartists.com/download/pdf/refDoc_web.pdf
Especially observe document [7]. There exist a number of bugs in the processor that is important to be aware of.
Observe that there can be newer versions of the documents than the ones linked to here. Always check for the latest information / version.
Copyright
A connectBlue???s Serial Port Adapter
Wizard
The Bluetooth QuickStart Board is designed to work with connectBlue???s Serial Port Adapter Wizard program ??? a program that helps you to configure the Bluetooth module for your specific needs.
Normally the Bluetooth module communicates over a serial channel with the LPC2106 microcontroller. By removing jumper J8, the serial channel of the Bluetooth module is directly connected to the serial interface of the Bluetooth QuickStart Board. This way, a PC application (like connectBlue???s Serial Port Adapter Wizard program) can directly communicate with the Bluetooth module over the serial interface, and without removing the module from the Bluetooth QuickStart Board.
See Figure 18 on page 25 for a description about where to find jumper J8. As written, this jumper must be removed (is normally shorted) when connectBlue???s Serial Port Adapter Wizard program is used. Also observe that the Bootloader switch must be placed in position: ???automatic bootloader not enabled???.
Observe that the Bluetooth QuickStart Kit assumes that the Bluetooth module is configures with the following parameters:
???115200 bps, 8N1, no hardware handshake signals
???LAN Access Server
You can change the parameters while using the Serial Port Adapter Wizard, but you must change the parameters back to above when using the QuickStart library.
Copyright
B Application Program Interface (API)
This appendix describes the QuickStart library API in detail. The description is divided into functional sections. Please refer to appendix C for sample applications that illustrate how the API can be used in practical applications.
B.1 Preemptive
B.1.1 Error Codes
???OS_OK (0x00) - Operation completed successfully
???OS_ERROR_NULL (0x01) - A NULL pointer was supplied as an argument that is not allowed to be NULL.
???OS_ERROR_ISR (0x02) - The operation is not allowed inside an interrupt service routine.
???OS_ERROR_SEM_OVERRUN (0x03) - The semaphore cannot be given since the semaphore limit is already reached.
???OS_ERROR_PID (0x04) - An illegal pid was supplied to the function.
???OS_ERROR_ALLOCATE (0x05) - Out of process control blocks
???OS_ERROR_STATE (0x06) - Trying to resume a process that is not suspended.
???OS_ERROR_QUEUE_FULL (0x07) - The queue is full.
???OS_ERROR_TIMEOUT (0x08) - The operation returned due to a timeout.
???OS_ERROR_PRIO (0x09) - The priority level is out of range.
B.1.2 osSemInit
void osSemInit( tCntSem* pSem, tU8 initial )
This function initializes a counting semaphore and must be called before any other function is used on the semaphore.
Parameters:
[in] pSem ??? A pointer to an allocated counting semaphore structure. [in] initial ??? The initial counter value.
B.1.3 osSemTake
tBool osSemTake( tCntSem* pSem, tU32 timeout )
This function takes a counting semaphore, i.e. decreasing the semaphore counting. If the semaphore counter is zero the function will block until another process or an ISR gives the semaphore or a timeout occurs.
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
[in] timeout - After timeout ticks the operation will timeout. A timeout of zero means no timeout at all.
Copyright
Returns:
TRUE if semaphore was taken and FALSE if timeout or error.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully. OS_ERROR_ISR - The function was called from an interrupt service routine.
OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.4 osSemGive
void osSemGive( tCntSem* pSem )
This function gives a counting semaphore, i.e. increases the semaphore counter. If there are one or more processes waiting for the semaphore the process with highest priority is made ready to run.
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully. OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.5 osSemTryTake
tU8 osSemTryTake( tCntSem* pSem )
This function tries to take a counting semaphore. If the semaphore cannot be taken the function immediately returns instead of blocking. This function can be used from an ISR (interrupt service routine).
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
Returns:
0 if the semaphore was taken, else 1.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully. OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.6 osSleep
void osSleep( tU32 ticks )
This function puts a process to sleep for the specified number of ticks.
Parameters:
[in] ticks - The number of ticks to put the process to sleep.
Copyright
B.1.7 osPid
tU8 osPid( void )
This function returns the process identification descriptor for the running process.
Returns:
The process identification descriptor of the currently running process.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully.
OS_ERROR_ISR - The function was called from an interrupt service routine.
B.1.8 osISREnter
void osISREnter( void )
This function is used to notify the operating system that the application has entered an interrupt service routine (ISR). This is important if the ISR is using services from the operating system, since some services need to know if they are executed from an ISR or not. The function osISRExit should be used before the ISR returns to notify the operating system about the ISR exit.
B.1.9 osISRExit
void osISRExit( void )
This function is used to notify the operating system that the currently serviced interrupt is about to exit. The function is always used in conjunction with the function osISREnter, which should always be called before osISRExit. It is important to notify the OS about ISRs (Interrupt Service Routines) if they are using services from the operating system (since some services need to know if they are executed from an ISR or not).
B.1.10osDeleteProcess
void osDeleteProcess( void )
This function deletes the currently running process. The process control block used by the process will be freed and is therefore available for new processes.
B.1.11osCreateProcess
void osCreateProcess( void (*pProc)(void), tU8* pStk, tU16 stkSize, tU8* pPid, tU8 prio )
This function creates a new process. The process is not automatically started. To start the process the osStartProcess function must be called. A new process can only be created if there is a free process control block available. The number of process control blocks is specified during operating system configuration (maximum number of processes).
Parameters:
Copyright
[in] pProc - The process entry function.
[in] pStk - A pointer to the stack area to use. The stack area must be allocated before the process is created.
[in] stkSize - The size of the stack area in bytes.
[out] pPid - The returned process identification descriptor (pid).
[in] prio - The priority of the process. The priority is a number between 0 and
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully. OS_ERROR_PRIO - The supplied priority is not correct.
OS_ERROR_ALLOCATE - The process could not be created since there is no free process control blocks available. The number of process control blocks is specified during operating system configuration (maximum number of processes).
B.1.12osStartProcess
void osStartProcess( tU8 pid )
This function is used to start a process. The process must previously have been created by a call to osCreateProcess.
Parameters:
[in] pid - The process identification descriptor (pid) of the process to start. The pid is returned by osCreateProcess.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully.
OS_ERROR_PID - The supplied pid is not correct.
B.1.13osGetOverrunCounter
tU32 osGetOverrunCounter( tBool reset )
This function is applicable to cyclic processes. A cyclic process is said to overrun if it runs longer than the specified
Parameters:
[in] reset - If TRUE the overrun counter is reset after the read out, else it keeps its old value.
Returns:
The number of times the process has overrun.
B.1.14osSuspend
Copyright
void osSuspend( void )
This function suspends the currently running process. Another process can resume it by a call to osResume.
B.1.15osResume
void osResume( tU8 pid )
This function resumes a suspended process. It is valid to do resume on a process that has not been suspended.
Parameters:
[in] pid - The process to resume.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully.
OS_ERROR_PID - The supplied pid is not correct.
B.1.16osStackUsage
tU8 osStackUsage( tU8 pid )
This function returns the stack usage. The stack usage is based on the maximum size used so far, i.e. from the application start to the point where this function is called.
Parameters:
[in] pid - The pid of the process to check.
Returns:
The used fraction of the stack area specified in percent.
B.1.17osBinSemInit
void osBinSemInit( tBinSem* pSem, tBool free )
This function is used to initialize a binary semaphore and must be called before any other operations are called on a binary semaphore.
Parameters:
[in] pSem - A pointer to an allocated binary semaphore structure.
[in] free - The initial value of the binary semaphore. A binary semaphore has two states free or occupied. A free binary semaphore can be taken without blocking the process. If an occupied semaphore is taken the process has to wait until another process gives the semaphore.
B.1.18osBinSemTake
tBool osBinSemTake( tBinSem* pSem, tU32 timeout )
This function takes a binary semaphore. If the binary semaphore is already taken the function will block until the semaphore is given by another process or the specified timeout expires.
Copyright
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
[in] timeout - After timeout ticks the operation will timeout. If a timeout of zero is specified the function will never timeout.
Returns:
TRUE if semaphore was taken and FALSE if timeout or error.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully.
OS_ERROR_ISR - The function was called from an interrupt service routine.
OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.19osBinSemGive
void osBinSemGive( tBinSem* pSem )
This function gives (releases) a binary semaphore. If another process is waiting for the semaphore it is inserted into the ready list. If more than one process is waiting for the semaphore the one with the highest priority is inserted.
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
Possible error situations (what can be identified in an error code):
OS_OK - The function completed successfully. OS_ERROR_SEM_OVERRUN - The semaphore is already given.
OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.20osBinSemTryTake
tU8 osBinSemTryTake( tBinSem* pSem )
This function tries to take a binary semaphore. If the semaphore cannot be taken the function immediately returns without blocking. This function can be used from an ISR (interrupt service routine).
Parameters:
[in] pSem - A pointer to an initialized semaphore structure.
Returns:
0 if the semaphore was taken, else 1.
Possible error situations (what can be identified in an error code):
OS_ERROR_NULL - A NULL pointer was supplied to the function where it was not allowed.
B.1.21m_os_ena_int
Copyright
void m_os_ena_int( void )
This macro enables interrupts.
B.1.22m_os_dis_int
void m_os_dis_int( void )
This macro disables interrupts.
Copyright
B.2 TCP/IP API
B.2.1 m_buf_get_data
The macro m_buf_get_data is defined as:
#define m_buf_get_data( pBuf ) func( pBuf )
Where func is a function with the following prototype: void* func( tBuf* pBuf )
This is a macro that retrieves a pointer to the data within the buffer. What actually happens is that the pData pointer in the buffer structure is returned.
Parameters:
[in] pBuf - buffer that contains received data.
Returns:
A pointer to the actual data that resides within the buffer.
B.2.2 tcpNewTcb
tTcpTcb* tcpNewTcb( void )
This function allocates a new control block. Returns NULL if there are no more control blocks available.
Returns:
An allocated TCB or NULL if none available.
B.2.3 tcpBind
tS8 tcpBind( tTcpTcb* pTcb, tIPAddr* pIPAddr, tU16 port )
Bind a TCB to a port. E.g. port 80 if the application is a web server.
Parameters:
[in] pTcb - an allocated TCB that will be bound to a specific port.
[in] pIPAddr ??? the IP address to bind to. This parameter may be set to NULL if the TCB should be bound to all interfaces.
[in] port - the port number to use or 0 (zero) if the stack should choose a port number.
Returns:
One of the error codes specified below.
Possible error situations (what can be identified in an error code):
TCP_OK - no errors
TCP_NULL_POINTER - parameter pTcb was NULL.
TCP_PORT_IN_USE - port number is already assigned to a connection.
Copyright
B.2.4 tcpListen
tS8 tcpListen( tTcpTcb* pTcb )
Set the control block in listen mode (i.e. server)
Parameters:
[in] pTcb - an allocated and bound TCB
Returns:
One of the error codes specified below.
Possible error situations (what can be identified in an error code):
TCP_OK - no error
TCP_LISTEN_ERROR - This error is returned if the control block wasn't in
CLOSED state when tcpListen was called
B.2.5 tcpAccept
void tcpAccept( tTcpTcb* pTcb, void (*pAcc)(tTcpTcb* pTcb) )
Registers an accept callback function. When a client attempts to connect to a TCB in listen mode (a server socket) the accept callback function will be called. Supplied with this accept call is the new control block for the established connection. It is this new control block that should be used when sending and receiving data through the connection.
Limitations to the number of accepted connections have to be controlled by the application. The example below specifies how this can be done.
if(nbrOfConnections++ >= MAX_NBR_CONNECTIONS) tcpClose(pTcb);
else
...
Parameters:
[in] pTcb - an allocated, bound TCB in LISTEN mode. [in] pAcc - function pointer for the accept callback.
Parameters to (*pAcc):
[in] pTcb - control block for the established connection.
B.2.6 tcpReceive
void tcpReceive( tTcpTcb* pTcb, void (*pRecv)(tTcpTcb* pTcb, tBuf* pBuf, tU16 len, tS8 err) )
This function registers a receive callback. The callback will be called whenever there is received data on the established connection. Parameters to the callback function are the control block for the connection, a pointer to the buffer containing the data, length of the data and an error code.
Parameters:
[in] pTcb - a control block for an established connection. [in] pRecv - function pointer to the receive callback.
Copyright
Parameters to (*pRecv):
[in] pTcb - control block for the connection.
[in] pBuf - pointer to the buffer containing data. A pointer to the actual data can be retrieved by using the m_buf_get_data function.
[in] len - length of data in bytes.
[in] err - TCP_OK, TCP_REMOTE_CLOSE, TCP_ERROR.
B.2.7 tcpBufProcessed
void tcpBufProcessed( tTcpTcb* pTcb, tBuf* pBuf )
This function must be called when received data has been processed. If this function is not called the received buffer will not be
NOTE: It is assumed that the data is processed in the same order as it is received.
Parameters:
[in] pTcb - control block for an established connection [in] pBuf - processed buffer
B.2.8 tcpConnect
void tcpConnect( tTcpTcb* pTcb, tU8* pDestIP, tU16 destPort, void (*pConn)(tTcpTcb* pTcb, tS8 err) )
This function tries to connect to a remote host. A callback function is register with this call. When the connect attempt succeeds the callback function will be called.
Parameters:
[in] pTcb - an allocated and bound control block.
[in] pDestIP - destination IP address, e.g. {192, 168, 0, 45}. [in] destPort - destination port number.
[in] pConn - function pointer to the connect callback. This function will be called when the connect attempt succeeds. Supplied with this call is a control block for the established connection and an error code.
Parameters to (*pConn):
[in] pTcb - control block for the connection.
[in] err - error code (TCP_OK or TCP_CONN_REFUSED)
B.2.9 tcpSend
tS8 tcpSend( tTcpTcb* pTcb, tU8* pData, tU32 len )
This function sends data through an established connection. A callback function has to be registered if the application needs to know when the data has been sent and acknowledged, i.e. when the sent data can be
Copyright
Parameters:
[in] pTcb - control block for an established connection. [in] pData - data to send
[in] len - length of data
Returns:
One of the following error codes:
Possible error situations (what can be identified in an error code):
TCP_OK - no errors
TCP_NULL_POINTER - pTcb or pData is NULL.
TCP_NOT_CONNECTED - connection is not established.
TCP_OUT_OF_BUF - the stack is out of buffers.
TCP_LEN_ZERO - the specified length parameter is zero.
B.2.10tcpRegSentCallb
void tcpRegSentCallb( tTcpTcb* pTcb, void (*pSent)(tTcpTcb* pTcb, void* p) )
Registers a callback function that will be called when sent data has been acknowledged. It is now safe to deallocate the sent data if it was dynamically allocated. Supplied with the callback is the control block for the connection through which the data was sent and a pointer to the sent data. This is the same pointer as was supplied with the tcpSend call (pData).
Parameters:
[in] pTcb - an allocated control block
[in] pSent - function pointer to the sent callback
Parameters to (*pSent):
[in] pTcb - the control block
[in] p - pointer to the data that was supplied with the send call.
B.2.11tcpClose
void tcpClose( tTcpTcb* pTcb )
Close down a connection. If it is an established connection that is closed, the control block will not be
Parameters:
[in] pTcb - control block for the connection to close.
B.2.12udpNewTcb
tUdpTcb* udpNewTcb( void )
Copyright
This function allocates a new control block. Returns NULL if there are no more control blocks available.
Returns:
An allocated TCB or NULL if none available.
B.2.13udpBind
tS8 udpBind( tUdpTcb* pTcb, tIPAddr* pIPAddr, tU16 port )
Bind a TCB to a port.
Parameters:
[in] pTcb - an allocated TCB that will be bound to a specific port.
[in] pIPAddr ??? the IP address to bind to. This parameter may be set to NULL if the TCB should be bound to all interfaces.
[in] port - the port number to use or 0 (zero) if the stack should choose a port number.
Returns:
One of the following error codes:
Possible error situations (what can be identified in an error code):
UDP_OK - no errors
UDP_NULL_POINTER - parameter pTcb was NULL.
UDP_PORT_IN_USE - port number is already assigned to a connection.
B.2.14udpReceive
void udpReceive( tUdpTcb* pTcb, void (*pRecv)(tUdpTcb* pTcb, tBuf* pBuf, tU16 len) )
This function registers a receive callback. The callback will be called whenever there is data to receive on the connection. Parameters to the callback function are the control block for the connection, a pointer to the buffer containing the data and length of the data.
Parameters:
[in] pTcb - a bound control block
[in] pRecv - function pointer to the receive callback.
Parameters to (*pRecv):
[in] pTcb - control block for the connection.
[in] pBuf - pointer to the buffer containing data. A pointer to the actual data can be retrieved by using the m_buf_get_data macro.
[in] len - length of data in bytes.
B.2.15udpBufProcessed
void udpBufProcessed( tUdpTcb* pTcb, tBuf* pBuf )
Copyright
This function must be called when received data has been processed. If this function is not called the received buffer will not be
Parameters:
[in] pTcb - control block for an established connection. [in] pBuf - processed buffer.
B.2.16udpSend
tS8 udpSend( tUdpTcb* pTcb, tIPAddr* pDestIP, tU16 destPort, tU8* pData, tU16 len, void (*pBufSent)(void* pData) )
This function sends data through a connection.
A callback function (pBufSent) must be registered if the application needs to know when the data has been sent from the stack, i.e. when the sent data can be deallocated.
Parameters:
[in] pTcb - bound control block for the connection. [in] pDestIP - destination IP address.
[in] destPort - destination port number [in] pData - data to send
[in] len - length of data
[in] pBufSent - function pointer to a buffer sent callback. Supplied with the callback is a pointer to the sent data. This callback will be called when the data has been sent from the stack. It will then be safe to
Parameters to (*pBufSent):
[in] pData - Pointer to data supplied with the send call.
Returns:
One of the following error codes:
Possible error situations (what can be identified in an error code):
UDP_OK - no errors
UDP_OUT_OF_BUF - out of buffers
B.2.17udpClose
void udpClose( tUdpTcb* pTcb )
Close down a connection. The control block is
Parameters:
[in] pTcb - control block for the connection.
Copyright
B.3 Web Server API
B.3.1 m_get_request_method
The macro m_get_request_method is defined as:
#define m_get_request_method( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Get the request method (e.g. "GET") for a specific connection and request.
Parameters:
[in] pConn - control block for the connection.
Returns:
The request method or NULL if none available.
B.3.2 m_get_server_protocol
The macro m_get_server_protocol is defined as:
#define m_get_server_protocol( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Get the server protocol (e.g. "HTTP/1.0") used for a specific connection and request.
Parameters:
[in] pConn - control block for the connection.
Returns:
The server protocol or NULL if none available.
B.3.3 m_get_document_uri
The macro m_get_document_uri is defined as:
#define m_get_document_uri( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Get the document URI (e.g. "/page.html") for a specific connection and request.
Parameters:
[in] pConn - control block for the connection.
Returns:
The document URI or NULL if none available.
B.3.4 m_get_query_string
The macro m_get_query_string is defined as:
Copyright
#define m_get_query_string( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Get the query string (e.g. "x=10&y=34") for a specific connection and request.
Parameters:
[in] pConn - control block for the connection.
Returns:
The query string or NULL if none available.
B.3.5 m_conn_isused
The macro m_conn_isused is defined as:
#define m_conn_isused( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Check if a control block is in use or not.
Parameters:
[in] pConn - control block for the connection.
Returns:
TRUE if the connection is used; otherwise FALSE.
B.3.6 m_get_content_length
The macro m_get_content_length is defined as:
#define m_get_content_length( pConn ) func( pConn )
Where func is a function with the following prototype:
tU8* func( tConnect* pConn )
Get the content length header from a specific connection and request.
Parameters:
[in] pConn - control block for the connection.
Returns:
The content length or NULL inf none available.
B.3.7 m_get_egi_state
The macro m_get_egi_state is defined as:
#define m_get_egi_state( pConn ) func( pConn )
Where func is a function with the following prototype: tU8* func( tConnect* pConn )
Get the egi state. This variable is not manipulated by the Web Server, but can be used to implement a state machine in an EGI function.
Copyright
Parameters:
[in] pConn - control block for the connection.
Returns:
The EGI state.
B.3.8 m_set_egi_state
The macro m_set_egi_state is defined as:
#define m_set_egi_state( pConn ) func( pConn )
Where func is a function with the following prototype: void func( tConnect* pConn )
Set the egi state. This variable is not manipulated by the Web Server, but can be used to implement a state machine in an EGI function.
Parameters:
[in] pConn - control block for the connection.
B.3.9 comPrintString
tBool comPrintString( tConnect* pConn, tU8* pStr )
Print a string to the output buffer.
Parameters:
[in] pConn - Control block for the connection. [in] pStr - The string to print
Returns:
TRUE if the string was copied to the output buffer; otherwise FALSE.
B.3.10comPrintUInt
tBool comPrintUInt( tConnect* pConn, tU32 intVal, tBool hex )
Print an unsigned integer to the output buffer
Parameters:
[in] pConn - Control block for the connection. [in] intVal - Integer to print
[in] hex - TRUE if the integer value should be printed as a hexadecimal value.
Returns:
TRUE if the string version of the integer was copied to the output buffer; otherwise
FALSE.
B.3.11comPrintSInt
tBool comPrintSInt( tConnect* pConn, tS32 intVal )
Print a signed integer to the output buffer.
Copyright
Parameters:
[in] pConn - Control block for the connection. [in] intVal - Integer value to print.
Returns:
TRUE if the string version of the integer could be copied to the output buffer; otherwise FALSE.
B.3.12comPrintChar
tBool comPrintChar( tConnect* pConn, tU8 ch )
Print a character to the output buffer.
Parameters:
[in] pConn - Control block for the connection. [in] ch - The character to print.
Returns:
TRUE if the character could be copied to the output buffer; otherwise FALSE.
B.3.13comWrite
tU16 comWrite( tConnect* pConn, tU8* pData, tU16 dataLen )
Write data to the output buffer. This function will return the number of bytes that could be sent.
Parameters:
[in] pConn - Control block for the connection. [in] pData - Data to send.
[in] dataLen - Length of the data to send.
Returns:
Number of bytes that were written
B.3.14comHeader
tBool comHeader( tConnect* pConn, tU8* pHeaderStr, tU8* pValue, tU32 value )
Function to use for sending headers to an open client connection, i.e. as a response to a client request.
Parameters:
[in] pConn - Control block for the connection.
[in] pHeaderStr - Either both header and value or just header. If the entire header is specified in this string it must end with "\r\n", i.e. CRLF. If only the header is specified in this string it must end with ": ", i.e. a colon and a space.
[in] pValue - A string header value or NULL.
Copyright
[in] value - An integer header value. This parameter is only used when pHeaderStr does not end with CRLF and pValue == NULL.
Returns:
TRUE if the headers was sent; otherwise FALSE
B.3.15comEndHeaders
void comEndHeaders( tConnect* pConn )
End the headers section of a response to the client. This function must be called in order to end the headers section correctly. When this function has been called it is no longer possible to add more headers to the response via the comHeader function.
Parameters:
[in] pConn - Control block for the connection.
B.3.16comRead
tU16 comRead( tConnect* pConn, tU8* pBuf, tU16 len )
Copy data from a client socket into a
Parameters:
[in] pConn - Control block for the connection. [out] pBuf - Output buffer (data will be copied here) [in] len - Length of output buffer.
Returns:
Number of read bytes.
B.3.17httpGet
void httpGet( tConnect* pConn, tU8* pURI )
Handle a HTTP GET request. This function will translate the resource name, pointed to by pURI into the name of a file, which will be sent to the client.
Parameters:
[in] pConn - Control block for the connection. [in] pURI - The requested resource.
B.3.18registerEGI
tBool registerEGI( tU8* pPath, tU8 (*pHandler)(tConnect* pConn) )
Register an EGI function, which may be invoced by client requests. This function should only be called after webInit has been called. Since all EGI functions are called with a NULL pointer during initialization, they must be prepared to handle this case. EGI functions should send the appropriate HTTP headers and may return either EGI_DONE, EGI_ERROR or EGI_SUSPEND.
Copyright
Parameters:
[in] pPath - The directory path to the command hook. [in] pHandler - The EGI function.
Parameters to (*pHandler):
[in] pConn - Control block for the connection.
Return value of (*pHandler):
EGI_DONE, EGI_ERROR or EGI_SUSPEND.
Returns:
TRUE if the function could be registered properly; otherwise FALSE.
B.3.19symLocal
tSymTable* symLocal( tConnect* pConn )
Return a handle to the local symbol table. Local symbols are stored for each active client connection and usually contains only
Parameters:
[in] pConn - Control block for the connection.
Returns:
A reference to the local symbol table.
B.3.20symDecl
tBool symDecl( tSymTable* pTable, tU8* pName, void (*pFreeName)(void* pName), void* pAddr, void (*pFreeAddr)(void* pAddr), void (*pAccess)(tU8* pName, void* pAddr), tSymType type )
Declare a named variable. Name and address of data is passed by reference and are NOT being copied by this function. This means that references to automatic variables should not be used. The declared variable may later be looked up by referring to the given name.
Parameters:
[in] pTable - The symbol table.
[in] pName - The variable name to use.
[in] pFreeName - Function to release memory occupied by the name. This parameter may be NULL if the name does not need to be released.
[in] pAddr - The address to the variable.
[in] pFreeAddr - Function to release memory occupied by the variable. This parameter may be NULL if the variable does not need to be released.
[in] pAccess - Function that will be called just before this variable is read (via the symGet function). This parameter may be NULL.
[in] type - The type of this variable.
Copyright
Parameters to (*pFreeName):
[in] pName - Memory to release.
Parameters to (*pFreeAddr):
[in] pAddr - Memory to release.
Parameters to (*pAccess):
[in] pName - Name of the variable [in] pAddr - Address of the variable.
Returns:
TRUE if the variable could be allocated. The parameters will be
B.3.21symGet
tBool symGet( tSymTable* pTable, tU8* pName, void* ppAddr, tSymType* pType )
Get a variable registered in the symbol table.
Parameters:
[in] pTable - The symbol table
[in] pName - Name of the variable to get.
[out] ppAddr - Address of variable data (pointer to pointer). [in] pType - Type of this variable.
Returns:
TRUE if the variable could be found. FALSE otherwise.
B.3.22symRemove
tBool symRemove( tSymTable* pTable, tU8* pSym )
Remove a named symbol
Parameters:
[in] pTable - The symbol table to use. [in] pSym - The symbol name.
Returns:
TRUE if the symbol could be removed; otherwise FALSE.
B.3.23symFirst
tBool symFirst( tSymTable* pTable, tU8** ppSym, void* ppAddr, tSymType* pType, tSymState* pState )
Get the first symbol in a symbol table.
Parameters:
[in] pTable - The symbol table to use.
Copyright
[out] ppSym - The symbol name.
[out] ppAddr - The address of the symbol value (pointer to pointer). [out] pType - The type of the symbol
[out] pState - The current state identifier.
Returns:
TRUE if there was a symbol in the table; otherwise FALSE.
B.3.24symNext
tBool symNext( tU8** ppSym, void* ppAddr, tSymType* pType, tSymState* pState )
Get the next symbol in a symbol table.
Parameters:
[out] ppSym - The symbol name
[out] ppAddr - The address of the symbol value (pointer to pointer). [in] pType - The type of the symbol.
[in] pState - The current state identifier.
Returns:
TRUE if there was a symbol in the table; otherwise FALSE.
B.3.25symSend
tBool symSend( tConnect* pConn, tSymTable* pTable, tU8* pSym, tBool* pSent )
Send the text representation of the symbol value to a client.
Parameters:
[in] pConn - Control block for the connection. [in] pTable - Symbol table to use.
[in] pSym - The name of the symbol to send
[out] pSent - TRUE if the symbol was sent; otherwise FALSE.
Returns:
TRUE if the symbol could be found; otherwise FALSE.
Copyright
B.4 File System API
B.4.1 fatOpen
tFatResult fatOpen( const tU8* pPath, const tU8* pMode, tFatHandle* pHandle )
This function attempts to open the file with the specified absolute path. If successful, the pHandle will hold the handle to the opened file. Note that pHandle must only be used if FAT_OK is returned.
Parameters:
[in] pPath - The absolute path of the file to open.
[in] pMode - Specifies how the file will be used: "r" = Read only
"w" = Write only, existing file will be cleared
"a" = Write only, new data will be appended to existing
"r+" = Read and Write, new data will be appended to existing "w+" = Same as "r+"
"a+" = Same as "r+"
[out] pHandle - A handle to the file.
Returns:
FAT_OK if the file was opened, otherwise one of the error codes
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_A_FOLDER - If pPath points to a folder and not a file
FAT_ERROR_TOO_MANY_OPEN - No more free handles
FAT_ERROR_INV_MODE - Not a valid pMode
FAT_ERROR_READ_ONLY - If mode is 'w' or 'a' and writing is not allowed by m_fat_media_allow_write()
FAT_ERROR_FS_NOT_INITIALIZED - The fatInit() function has not been called
B.4.2 fatFileSize
tFatResult fatFileSize( const tFatHandle handle, tU32* pSize )
Returns the size of the specified file.
Parameters:
[in] handle ??? A handle to the file. [out] pSize ??? The size of the file.
Returns:
FAT_OK if the file size could be determined, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_A_FOLDER - The handle points to a folder, not a file
FAT_ERROR_INV_HAND - The handle is invalid
Copyright
B.4.3 fatIsDir
tFatResult fatIsDir( const tFatHandle handle, tBool* pIsDir )
Tests if the specified handle represents a file or folder.
Parameters:
[in] handle ??? A handle to the file.
[out] pIsDir ??? TRUE if the entry is a directory, otherwise FALSE
Returns:
FAT_OK if the test could be determined, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_INV_HAND - The handle is invalid
B.4.4 fatRead
tFatResult fatIsDir( const tFatHandle handle, tU32 size, tU8* pBuf, tU32 pNumRead )
This function attempts to read up to size bytes from the file pointed to by the pFile handle. The offset from where the bytes will be read is specified in the handle and the offset will be updated with the number of bytes that are read. The number of bytes actually read may be smaller than the wanted number for a number of reasons, e.g., if the end of file is reached, or the block size used by the device driver is smaller than the requested size.
Parameters:
[in] handle ??? A handle to the file.
[in] size ??? The number of bytes to read [in/out] pBuf ??? The buffer to store read data in
[out] pNumRead ??? The number of bytes that were actually read
Returns:
FAT_OK if at least one byte could be read, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_INV_HAND - The handle is invalid
FAT_ERROR_A_FOLDER - The handle points to a folder, not a file
FAT_ERROR_EOF - File position was EOF before the call to fatRead
FAT_ERROR_READ - Read from media failed
B.4.5 fatWrite
tFatResult fatWrite( const tFatHandle handle, tU8* pBuf, tU32 size )
Copyright
This function attempts to write size bytes to the file pointed to by the handle. The offset to where the bytes will be written is specified in the handle and the offset will be updated with the number of bytes that are written.
Parameters:
[in] handle ??? A handle to the file.
[in] pBuf ??? The buffer with the data to write [in] size ??? The number of bytes to write
Returns:
FAT_OK if exactly size bytes were written, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully. FAT_ERROR_INV_HAND - The handle is invalid FAT_ERROR_A_FOLDER - The handle points to a folder, not a file FAT_ERROR_WRITE - Writing to the media failed
FAT_ERROR_READ_ONLY - If m_fat_media_allow_write() does not allow write operations
B.4.6 fatClose
tFatResult fatClose( tFatHandle* pHandle )
This function closes the specified file/folder and releases all used resources. The actual structure must be freed by the caller.
Parameters:
[in/out] pHandle ??? A handle to the file or folder to close
Returns:
FAT_OK if the file/folder could be closed, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_INV_HAND - The handle is invalid
B.4.7 fatRemoveFile
tFatResult fatRemoveFile( const tU8* pPath )
This function deletes the specified file.
Parameters:
[in] pPath ??? An absolute path to the file to remove.
Returns:
FAT_OK if the file existed and was removed, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_NOT_EXIST ??? The file did not exist
Copyright
FAT_ERROR_A_FOLDER ??? The path points to a folder and not a file
FAT_ERROR_FS_NOT_INITIALIZED ??? The file system has not been initialized
FAT_ERROR_READ_ONLY ??? The file system is
B.4.8 fatReadDirEntry
tFatResult fatReadDirEntry( const tFatHandle handle, tFatDirEntry* pFatDirEntry )
This function opens the next entry in the specified folder. The pDir parameter will be updated. The pFatDirEntry structure will be filled with information about the new entry. This function will skip past the "." and ".." directory entries.
Parameters:
[in] handle ??? A handle to the folder to look in
[in/out] pFatDirEntry ??? A pointer to a
Returns:
FAT_OK if a new entry was found, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_INV_HAND ??? The handle is invalid
B.4.9 fatGetEntryIsDir
tFatResult fatGetEntryIsDir( tFatDirEntry* pFatDirEntry, tBool* pIsDir )
Tests whether the specified entry is a file or folder.
Parameters:
[in] pFatDirEntry ??? The entry to test
[out] pIsDir ??? TRUE if the entry is a folder, FALSE if it is a file.
Returns:
FAT_OK if a entry was valid, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
B.4.10fatGetEntrySize
tFatResult fatGetEntrySize( tFatDirEntry* pFatDirEntry, tU32* pSize )
Returns the size of the specified file.
Parameters:
[in] pFatDirEntry ??? The entry pointing to a file [out] pSize ??? The size of the file
Returns:
FAT_OK if a entry was valid, otherwise an error code
Copyright
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_A_FOLDER ??? The entry did not point to a file.
B.4.11fatGetEntryName
tFatResult fatGetEntryName( tFatDirEntry* pFatDirEntry, tU8** ppFilename )
Returns the name of the specified entry. The name will be encoded in Unicode (two bytes per character).
Note: The returned ppFilename must NOT be modified or freed.
Parameters:
[in] pFatDirEntry ??? The entry to extract the name from [out] ppFilename ??? Will contain the filename
Returns:
FAT_OK if a entry was valid, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
B.4.12fatCreateDir
tFatResult fatCreateDir( const tU8* pPath )
This function creates a new directory with the specified absolute path. This operation can fail for a number of reasons. E.g. if a file or folder with that name already exists.
Parameters:
[in] pPath ??? An absolute path to the new directory.
Returns:
FAT_OK the directory was created, otherwise an error code
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_EXISTS - There is already a folder matching the pPath
FAT_ERROR_A_FILE - There is a file matching the pPath
FAT_ERROR_FS_NOT_INITIALIZED ??? The file system has not been initialized.
FAT_ERROR_READ_ONLY - The file system is
B.4.13fatDeleteDir
tFatResult fatDeleteDir( const tU8* pPath )
This function deletes the specified directory if and only if it is empty.
Parameters:
[in] pPath ??? An absolute path to the directory to remove.
Returns:
FAT_OK the directory was removed, otherwise an error code
Copyright
Possible error situations (what can be identified in an error code):
FAT_OK - The function completed successfully.
FAT_ERROR_NOT_EXISTS - There is no folder matching the pPath
FAT_ERROR_A_FILE - There is a file matching the pPath
FAT_ERROR_FS_NOT_INITIALIZED ??? The file system has not been initialized.
FAT_ERROR_READ_ONLY - The file system is
Copyright
B.5 PPP API
B.5.1 Link Layer (with script engine)
The link layer is used between PPP and the harware device driver (e.g. a UART). This layer includes a script engine that can be used to control the link. Command strings (init, start and close) are assigned to the link. These strings are then parsed and executated at different times in the PPP state machine.
A command in a command string always begins with the character '@' followed by a command character. The following commands can be used in a command string:
???@r TIME STRING@ - wait maximum TIME milliseconds for the string STRING. If TIME is omitted or set to 0 this is the same as wait forever. This command ends with the character '@'.
???@w TIME - wait TIME milliseconds
???@@ - send the character '@'
To send control characters in a string the character '^' is used before the character representing the control character. ^A is the same as 0x01, ^B is the same as 0x02 and so on.
A CR is ^M and a LF is ^J. Examples:
1.@rCLIENT@CLIENTSERVER
2.@w1000CLIENTw300CLIENT@r1000CLIENTSERVER
3.@w5000atdt020123456^M^J@rCONNECT@
1)Wait forever for the string CLIENT and when it is received send CLIENTSERVER
2)Wait 1 second (1000 ms) and then send the string CLIENT. Wait another 300 ms and then send CLIENT again. Wait maximum 1 second to receive the string CLIENSERVER. If the the string CLIENTSERVER is not received within 1 second the command string will be re- executed.
3)Wait 5 seconds and then send atdt020123456CRLF and then wait forever for the string
CONNECT.
B.5.2 linkSetInit
void linkSetInit( tPppDev* pDev, tU8* pInitStr )
Assign the init command string to the device. This command string is executed only when the 'linkInit' function is called. The linkInit function is never called directly by PPP, it must be called from the application code if the init command string must be executed.
Parameters:
[in] pDev - device structure
[in] pInitStr - init command string
B.5.3 linkSetStart
Copyright
void linkSetStart( tPppDev* pDev, tU8* pStartStr )
Assign the start command string to the device. This command string will be executed when the 'linkStart' function is called. The 'linkStart' function will be called from LCP when the
Parameters:
[in] pDev - device structure
[in] pStartStr - start command string
B.5.4 linkSetClose
void linkSetClose( tPppDev* pDev, tU8* pCloseStr )
Assign the close command string to the device. This command string will be executed when the 'linkClose' function is called. The 'linkClose' function will be called from LCP when the
Parameters:
[in] pDev - device structure
[in] pCloseStr - close command string
B.5.5 linkInit
tBool linkInit( tPppDev* pDev )
Execute the init command string. If the init command string contains timeouts (@w or @r) this function will return before the command string has been completely processed.
Parameters:
[in] pDev - device structure
Returns:
TRUE if the processing started; FALSE if a command string is already being processed.
B.5.6 linkStart
tBool linkStart( tPppDev* pDev )
Execute the start command string. If the start command string contains timeouts (@w or @r) this function will return before the command string has been completely processed. This function will be called by LCP when the
Parameters:
[in] pDev - device structure
Returns:
TRUE if the processing started; FALSE if a command string is already being processed.
B.5.7 linkClose
Copyright
tBool linkClose( tPppDev* pDev )
Execute the close command string. If the close command string contains timeouts (@w or @r) this function will return before the command string has been completely processed. This function will be called by LCP when the
Parameters:
[in] pDev - device structure
Returns:
TRUE if the processing started; FALSE if a command string is already being processed.
B.5.8 linkDisconnect
void linkDisconnect( tPppDev* pDev )
This function should be called when the link is disconnected. The LCP layer will be notified about the disconnection.
Parameters:
[in] pDev - device structure
B.5.9 pppLocalUser
void pppLocalUser( tPppDev* pDev, tU8* pUser, tU8* pPass )
Register a local user/password. Only one user can be registered per PPP connection. This user/password information is used if we need to authenticate ourself when connecting to a peer.
Parameters:
[in] pDev - device structure. Contains the PPP control block. [in] pUser -
[in] pPass -
B.5.10pppRemoteUser
tBool pppRemoteUser( tU8* pUser, tU8* pPass )
Register a remote user/password. More than one user/password may be registered. This function returns FALSE if no more users can be registered. Registered users will be used when a peer tries to authenticate itself.
Parameters:
[in] pUser -
[in] pPass -
Returns:
TRUE if the user was registered; FALSE if no more users can be registered.
Maximum number of users are specified by MAX_NUM_USERS.
Copyright
B.5.11pppReqAuth
void pppReqAuth( tPppDev* pDev, tBool on )
Enable/disable request authentication. It is disabled by default. A request for authentication is normally done by a server. A client must send a valid user ID and password in order for PPP to establish a connection. The function 'pppRemoteUser' is used to register user IDs and passwords that clients can use to authenticate themselves.
Parameters:
[in] pDev - device structure
[in] on - TRUE if authentication should be requested; otherwise FALSE.
B.5.12 pppOpen
pppOpen( tPppDev* pDev, tBool restart )
Open/start PPP. If all layers (IPCP, PAP, LCP) are in the INITIAL state, i.e. open has not been called before or PPP has been completely closed down, the start command string for the link will be parsed and executed. The start command string is specified and assigned to a PPP device by calling the 'linkSetStart' function.
Parameters:
[in] pDev - device structure
[in] restart - set this to TRUE if PPP should automatically restart itself if it was closed down due to failed peer authentication. If we request authentication from a peer but the peer fails in authenticating itself, PPP will be closed down. If restart is set to TRUE, PPP will restart after PPP_RESTART_TO ms by first calling pppClose and then pppOpen.
B.5.13pppClose
void pppClose( tPppDev* pDev )
Close PPP. All layers will be closed down,
Parameters:
[in] pDev - device structure
Copyright
B.6 UART API
B.6.1 uartPppBlock
void uartPppBlock( void )
This function will block PPP from accessing the UART connected to the Bluetooth module. Before PPP is blocked pppClose will be called.
The default behaviour is to have PPP monitoring the UART, connected to the Bluetooth module, in order to receive data from the Bluetooth link.
B.6.2 uartPppUnblock
void uartPppUnblock( void )
This function will allow PPP to access the UART connected to the Bluetooth module again. If uartPppBlock has not been called this function will have no effect.
Note: you have to call pppOpen after this function has been called in order to have PPP open/connect.
B.6.3 uartReadByte
tBool uartReadByte( tU8* pCh )
Read a byte of data from the UART connected to the Bluetooth module. This function must not be called before PPP has been blocked out of access to the UART. PPP is blocked out by calling the uartPppBlock function.
Parameters:
[out] pCh ??? the read byte is stored here (if there were data to read)
Returns:
TRUE if there was data to read; otherwise FALSE
B.6.4 uartSendByte
void uartSendByte( tU8 ch )
Write a byte of data to the UART connected to the Bluetooth module. This function must not be called before PPP has been blocked out of access to the UART. PPP is blocked out by calling the uartPppBlock function.
Parameters:
[in] ch ??? the data to send to the UART
Copyright
B.7 Registry API
B.7.1 regErase
void regErase( void )
Erase the entire registry.
B.7.2 regSetValue
tRegResult regSetValue( tU8* pKey, tU8 keyLen, tU8* pValue, tU16 valueLen )
Set a value in the registry. This function is used when a new value is added to the registry or when an old value is updated.
Parameters:
[in] pKey ??? the registry key associated with the value. This must be a unique value. [in] keyLen ??? the length of the key in bytes.
[in] pValue ??? the value to set
[in] valueLen ??? length of the value in bytes.
Returns:
REG_RESULT_OK if the value was successfully added (or updated).
Possible error situations (what can be identified in an error code):
REG_RESULT_OK - The function completed successfully.
REG_RESULT_KEY_LEN ??? The length of the key is too large.
REG_RESULT_FULL ??? The registry is full.
REG_RESULT_VAL_TRUNC ??? There was not enough space for the complete value.
It has been truncated.
B.7.3 regGetValue
tRegResult regGetValue( tU8* pKey, tU8 keyLen, tU8* pBuf, tU16 bufLen, tU16* pValueLen )
Get a value from the registry.
Parameters:
[in] pKey ??? the registry key associated with the value. [in] keyLen ??? the length of the key in bytes.
[in] pBuf ??? the value is copied to this buffer [in] bufLen ??? length of the buffer in bytes
[out] pValueLen ??? the actual length of the value is returned in this parameter.
Returns:
REG_RESULT_OK if the value was successfully retrieved.
Possible error situations (what can be identified in an error code):
REG_RESULT_OK - The function completed successfully.
REG_RESULT_NO_KEY ??? The key did not exist in the registry.
Copyright
REG_RESULT_VAL_TRUNC ??? There was not enough space in the output buffer for the complete value. It has been truncated.
B.7.4 regRemove
tRegResult regRemove( tU8* pKey, tU8 keyLen )
Remove a symbol from the registry. Both key and value will be removed.
Parameters:
[in] pKey ??? the registry key to be removed [in] keyLen ??? the length of the key in bytes.
Returns:
REG_RESULT_OK if the key was successfully removed.
Possible error situations (what can be identified in an error code):
REG_RESULT_OK - The function completed successfully.
REG_RESULT_NO_KEY ??? The key did not exist in the registry.
B.7.5 regNextKey
tRegResult regNextKey( tU8* pKey, tU8 keyLen, tU8* pLen, tS32* pState )
This function is used to iterate over all available keys in the registry. The first time this function is called *pState must be equal to REG_ITERATOR_START.
Parameters:
[in] pKey ??? the key is copied to this buffer
[in] keyLen ??? the length of the key buffer in bytes. [in] pLen ??? number of bytes copied to the key buffer.
[in/out] pState ??? keeps state information. When the first key should be found this parameter must be set to REG_ITERATOR_START.
Returns:
REG_RESULT_OK if the key was successfully found.
Possible error situations (what can be identified in an error code):
REG_RESULT_OK - The function completed successfully.
REG_RESULT_NO_KEY ??? When no more keys are found.
Copyright
B.8 I2C API
B.8.1 i2cCheckStatus
tS8 i2cCheckStatus( void )
Checks the I2C status.
Returns:
00h Bus error
08h START condition transmitted
10h Repeated START condition transmitted
18h SLA + W transmitted, ACK received
20h SLA + W transmitted, ACK not received
28h Data byte transmitted, ACK received
30h Data byte transmitted, ACK not received
38h Arbitration lost
40h SLA + R transmitted, ACK received
48h SLA + R transmitted, ACK not received
50h Data byte received in master mode, ACK transmitted 58h Data byte received in master mode, ACK not transmitted 60h SLA + W received, ACK transmitted
68h Arbitration lost, SLA + W received, ACK transmitted
70h General call address received, ACK transmitted
78h Arbitration lost, general call addr received, ACK transmitted
80h Data byte received with own SLA, ACK transmitted 88h Data byte received with own SLA, ACK not transmitted 90h Data byte received after general call, ACK transmitted 98h Data byte received after general call, ACK not transmitted
A0h STOP or repeated START condition received in slave mode A8h SLA + R received, ACK transmitted
B0h Arbitration lost, SLA + R received, ACK transmitted B8h Data byte transmitted in slave mode, ACK received C0h Data byte transmitted in slave mode, ACK not received C8h Last byte transmitted in slave mode, ACK received F8h No relevant status information, SI=0
FFh Channel error
B.8.2 i2cStart
tS8 i2cStart( void )
Generates a start condition on I2C when bus is free. Master mode will also automatically be entered.
Note: After a stop condition, you may need a bus free time before you can generate a new start condition.
Returns:
I2C_CODE_OK or I2C status code (see i2cCheckStatus)
B.8.3 i2cRepeatStart
Copyright
tS8 i2cRepeatStart( void )
Generates a start condition on I2C when bus is free. Master mode will also automatically be entered.
Note: After a stop condition, you may need a bus free time before you can generate a new start condition.
Returns:
I2C_CODE_OK or I2C status code (see i2cCheckStatus)
B.8.4 i2cPutChar
tS8 i2cPutChar( tU8 data )
Sends a character on the I2C network
Parameters:
[in] data ??? the character to send
Returns:
I2C_CODE_OK ??? The function completed successfully
I2C_CODE_BUSY ??? data register is not ready
B.8.5 i2cGetChar
tS8 i2cGetChar( tU8 mode, tU8* pData )
Read a character. I2C master mode is used. This function is also used to prepare if the master shall generate acknowledge or not acknowledge.
Parameters:
[in] mode ??? I2C_MODE_ACK0 Set ACK=0. Slave sends next byte I2C_MODE_ACK1 Set ACK=1. Slave sends last byte I2C_MODE_READ Read data from data register
[out] pData ??? a pointer to where the data shall be saved
Returns:
I2C_CODE_OK ??? The function completed successfully
I2C_CODE_EMPTY ??? no data is available
B.8.6 i2cWrite
tS8 i2cWrite( tU8 addr, tU8* pData, tU16 len )
Sends data on the I2C network
Note: After this function is run, you may need a bus free time before a new data transfer can be initiated.
Parameters:
[in] addr ??? the address to write to [in] pData ??? the data to transmit
[in] len ??? number of bytes to transmit
Returns:
Copyright
I2C_CODE_OK ??? The function completed successfully
I2C_CODE_ERROR ??? an error occurred
B.8.7 i2cWaitTransmit
tS8 i2cWaitTransmit( void )
Wait until data has been transmitted.
Parameters:
[in] addr ??? the address to write to [in] pData ??? the data to transmit
[in] len ??? number of bytes to transmit
Returns:
I2C_CODE_OK ??? The function completed successfully
I2C_CODE_ERROR ??? an error occurred
B.8.8 i2cWriteWithWait
tS8 i2cWriteWithWait( tU8 data )
Send a character on the I2C network and wait until it has been transmitted.
Parameters:
[in] data ??? the data to transmit
Returns:
I2C_CODE_OK ??? The function completed successfully
I2C_CODE_BUSY ??? data register is not ready
B.8.9 i2cRead
tS8 i2cRead( tU8 addr, tU8* pBuf, tU16 len )
Read a specified number of bytes from the I2C network.
Note: After this function is run, you may need a bus free time before a new data transfer can be initiated.
Parameters:
[in] addr ??? the address to read from
[in] pBuf ??? the read data is stored in this buffer [in] len ??? number of bytes to read
Returns:
I2C_CODE_OK or I2C status code (see i2cCheckStatus)
Copyright
B.9 EEPROM API
B.9.1 eepromPageRead
tS8 eepromPageRead( tU16 addr, tU8* pBuf, tU16 len )
Read data from the eeprom.
Parameters:
[in] addr ??? the address to read from
[in] pBuf ??? the read data is stored in this buffer [in] len ??? number of bytes to read
Returns:
I2C_CODE_OK ??? the function completed successfully
I2C_CODE_ERROR ??? an error occurred
B.9.2 eepromWrite
tS8 eepromWrite( tU16 addr, tU8* pData, tU16 len )
Read data from the eeprom.
Parameters:
[in] addr ??? the address to write to [in] pData ??? the data to write
[in] len ??? number of bytes to write
Returns:
I2C_CODE_OK ??? the function completed successfully
I2C_CODE_ERROR ??? an error occurred
B.9.3 eepromPoll
tS8 eepromPoll( void )
Waits till I2C returns ACK (after BURN cycle)
Returns:
I2C_CODE_OK ??? the function completed successfully
I2C_CODE_ERROR ??? an error occurred
Copyright
B.10 Time API
B.10.1clockMs
tU32 clockMs( void )
Returns number of milliseconds since
Returns:
Number of milliseconds since
Copyright
C Getting Started
This appendix contains information about how to quickly get up and running with your application development and describes the many sample applications that are included.
The Bluetooth QuickStart Kit comes shipped with a demo application
C.1 Program Installation
To quickly get up and running with your program development, perform the following actions:
1)Install GNUARM (GCC v3.4.3) (program included on the
2)Install
3)Register on Embedded Artists homepage.
4)Download the QuickStart library along with sample applications. Unpack the zip archive at an appropriate folder on your harddisk.
You will always have access to the latest version of the QuickStart library and the latest sample applications.
5)Test the sample applications and learn the platform API by studying the examples. To compile and download a sample application;
a.Open the
b.Change working directory to where you unzipped the QuickStart library. Change working directory to the specific sample application that you want to compile and download.
c.Type make to compile and link the program.
d.Type deploy to compile, link, and download the program. Make sure jumper J8 is shorted and the automatic bootloader is enabled (see Figure 18 on page 25 for details).
6)Start developing your own application.
C.2 Sample Applications
There are currently seven sample applications (plus the
C.2.1 Applet
This sample application illustrates how to create a simple applet that communicates with a server application on the embedded system.
The sample applet contains three panels:
???The first panel contains a temperature gauge and two buttons. The buttons will start or stop the process, on the embedded system, that send back (simulated) temperature data to the applet
???The second panel contains 8 buttons, which control the RGB Led. Each button will enable a color on the Led.
???The third panel contains a slider which just sends a data value to the embedded system. The data value is printed onto the console.
Copyright
Files
???sample_applet/led.c ??? this file contains code that controls the LED
???sample_applet/led.h ??? header file with prototypes and constants needed to control the LED.
???sample_applet/sample.c ??? this file contains the server code that interacts with the applet.
???sample_applet/www/applet.html ??? this is the HTML file that will be downloaded from the web server to start the applet.
???sample_applet/www/FlexiGauge.java ??? This is a Java class that implements a graphical item that is part of the applet.
???sample_applet/www/myApplet.jar ??? This is a Java archive that contains the compiled applet.
???sample_applet/www/myApplet.java ??? This is the actual applet code.
???sample_applet/www/VTextIcon.java ??? This is a Java class that implements a graphical item that is part of the applet.
1.Store the myApplet.jar and applet.html files in the web server directory on the memory card.
2.Use a web browser to do download the applet.html file from the web browser. The applet will now be started (given that you have Java runtime environment installed on your computer).
C.2.2 Bluetooth
This sample application illustrates how to create an application that communicates with the Bluetooth module. This specific example will request the Bluetooth module to search for Bluetooth devices.
Any device found will have its address and name printed onto the console.
Files
???sample_bluetooth/sample.c ??? this file contains the code for the sample application.
C.2.3 File System
This sample application illustrates how to use the File System API. The application shows how to create directories, create and write data to files, read data from files and list the content in a directory.
Files
???sample_filesys/sample.c ??? this file contains the code for the sample application.
Copyright
C.2.4 Registry
This sample application illustrates how to use the Registry, that is, persistent storage in the eeprom.
The example will start by trying to read a specified key from the registry. If the key is found the value associated with this key will be printed onto the console. If the key isn???t found a new default value will be written to the registry.
The example also illustrates how to iterate through all keys that are stored in the registry.
Files
???sample_registry/sample.c ??? this file contains the code for the sample application.
C.2.5 TCP Client
This sample application illustrates how to create a TCP client, that is, a client that will try to connect to a TCP server. The example also illustrates how to create and start OS processes.
The client will try to connect to the server until it succeeds. In the console it will print the following information:
???Trying to connect...error ??? if an error occurred while trying to connect. The error could, for example, be that there is no established Bluetooth connection.
???Trying to connect...refused ??? if there is no server listening on the IP address specified by the client.
???Trying to connect...connected ??? when the connection is established.
In order to test the client functionality a TCP server is needed. The file TCPServer.jar contains a TCP server implemented in Java. Start the server by typing java
Files
???sample_tcpclient/sample.c ??? this file contains the code for the sample application.
???sample_tcpclient/TCPServer.jar ??? this file contains a TCP server implemented in Java.
C.2.6 TCP Server
This sample application illustrates how to create a TCP server. The server listens to the port 2020 and will print received data onto the console.
Copyright
The functionality can be tested by using, for example, a Telnet client to connect to the server.
1.In Windows, open a command prompt and type telnet
2.Everything written to the telnet client will be sent to the TCP server and displayed in the console.
Files
???sample_tcpserver/sample.c ??? this file contains the code for the sample application.
C.2.7 Web Server
This sample application illustrates how to create EGIs and how to use SSIs. The following EGIs are implemented:
???counter.egi ??? increases a counter and sends the value to the client
???formget.egi ??? outputs the data sent to the EGI from a HTML form through a GET request.
???formpost.egi ??? outputs the data sent to the EGI from a HTML form through a POST request.
???setled.egi ??? controls the RGB LED.
???listreg.egi ??? lists all the keys and associated values in the registry
???addreg.egi ??? adds a value to the registry
???remreg.egi ??? removes a key from the registry
???dirlist.egi ??? lists the content of a directory in the file system
Copy all files from the sample_web/www directory to the web server directory on the memory card and access them through a web browser.
Files
???sample_web/led.c ??? this file contains code that controls the LED
???sample_web/led.h ??? header file with prototypes and constants needed to control the LED.
???sample_web/sample.c ??? this file contains the code for the sample application.
???sample_web/www/filesys.shtml ??? this file calls the dirlist.egi.
???sample_web/www/get.html ??? this file calls the formget.egi.
???sample_web/www/led.html ??? this file calls the setled.egi.
Copyright
???sample_web/www/post.html ??? this file calls the formpost.egi.
???sample_web/www/registry.shtml ??? this file interacts with the listreg.egi, addreg.egi and the remreg.egi.
???sample_web/www/ssi.shtml ??? this file illustrates how SSIs can be used. It also calls the counter.egi.
C.3 Stack Size Tips
Setting stack sizes to correct values can be difficult. It is important to have them as small as possible in order to save RAM. However, of a stack is too small the program is likely to crash. The normal process is as follows:
1.Set the stack sizes to a relatively large value.
2.Run the application for a suitable amount of time.
3.Use the ???stack usage??? feature in the operating system. This will give the number of bytes used in the stack for different processes in the system.
4.Adjust (i.e., decrease) the stack sizes according to these values.
Do not forget that printf() typically requires quite a lot of bytes from the stack. Avoid using
The stack sizes must normally not be very large. Below is a short list of recommendation to minimize stack requirements in the code:
???Avoid excessive use of local variables in functions since these will be placed on the stack. If they are needed, declare them as static, if possible (since this will not place them on the stack). The drawback with declaring variables as static is that functions are no longer reentrant.
???Avoid functions that take a large number in input parameters (more than 6) or structures. If possible, send a pointer to a structure with input values instead.
Observe that the sample applications have not been optimized for low stack usage. These stack sizes have intentionally been set to very large values since printf() calls are used in the code. There is a large potential to decrease stack sizes in these sample programs.
Copyright